@wicked1 I’m trying to get help for you and I think I have not asked or said anything to deserve the answer you first wrote. All the time I’m working on ArduPilot or giving support in the forum is done absolutely for free.
Regarding DIYDrones we have announced some time ago that all ArduPilot support would be changing over here. With Copter 3.4 we explicitly said the support would be done in this forum. Although some of us still go to DIYDrones, you can’t blame us if we don’t give support over there - we want support to shift here.
Regarding you and others having already posted logs: in DIYDrones we had a bad situation where all support was in the same thread, making it difficult to separate different issues; over here we seem to be going to the opposite extreme, many threads created to talk about the same issue. Since most of you with this issue seem now concentrated on this thread I asked that you posted logs to make it easy for us to analyze it - having to go to different threads grabbing logs about the same issue takes precious time from other important tasks, such as analyzing logs.
Regarding the answers you got: was that from someone from the ArduPilot team?
Like I said in the previous post we really appreciate your testing, I’m just asking that you make our life a little bit more easier.
Sorry, that’s why I edited it. You certainly didn’t do anything…
Basically, it’s not as easy as simply posting a log… a lot of us have. There seems to be a threshold of noise that has to be made about an issue, before it shows up on the devs radar, which is totally understandable.
Plus, I don’t think many of us are actually asking for help for free… I think we’re trying TO help for free… at least that’s the case for me… My copter fly’s great… and my production copter is not running test software and works fine. We’re all out there risking our copters with alpha and beta software in order to help everyone else.
(and I really didn’t mean for my post to come off as mean, but it sure seemed that way when I re-read it, which is why I edited it… I’m a little autistic… I don’t intend to be a dick…It just happens)
It’s OK, we should move on. Regarding the threshold of noise: before 3DR left ArduPilot there were people paid to do forum support; now that they left there is no one paid to do it. That means that anyone from the team looking at the forum is doing it in their free time - and sometimes that free time has to go to code development (not only programming but issue list maintenance, pull request review, etc.). I can tell you that last week I had about 20 tabs opened in my browser with things I needed to look at - about 10 were from the forum. I wanted to do it earlier but I just didn’t have the time.
The team, and me personally, really appreciate all the testing that our users do. But to make our life easier I’m asking that all of you share the link to your logs with the problematic autotunes over here, so that we can address it in the same thread.
Francisco: we can little contribute to mantain this forum sometimes when we open a topic and then discover that already exist erasing it and moving the question to the other, updating the log, etc (as my autotune post that is duplicate with this and log is out of date now) but I couldn’t find the way to remove it, It’s any choice to do it? thank’s
@Leonardthall
Hi Leonard,
I guess my problem is : MOT_THST_HOVER, 0.1654751
However, the copter flies perfectly with the latest master (V3.4-dev (0eac5a5c), Jul 4, 2016) and manual tuning based on the one autotune that returned reasonable values on the pitch axis. If you are interested in a log please let me know.
I tried autotune with MOT_PWM_TYPE, 2 again. It starts and works as expexted but again the resulting values are too low.
What I suggest to cala, wicked1, and lorbass is to
save the PIDs of your 3.3 copter,
install plane or rover to clear all Params
install the latest master
compare the Params and update only the really relevant ones
As far as I’m aware there is no way for a regular user to remove a post. Even I don’t have moderator rights, although, given the time I’m spending here, I will probably ask for those. The good thing about this forum system is that the more and more you interact with the community the more rights you get: you can look user levels at https://meta.discourse.org/t/what-do-user-trust-levels-do/4924
But if you open a topic and then realize that there was already one where you could have posted, the best thing to do is:
repost in the other topic
edit yours with a link to the other topic. If you put the link right at the beginning of your post and explain that discussion should go there I think that’s enough
For those of you having trouble with a poor autotune result increase AUTOTUNE_AGGR to 0.1. This is generally caused by too much noise increasing this number addresses that.
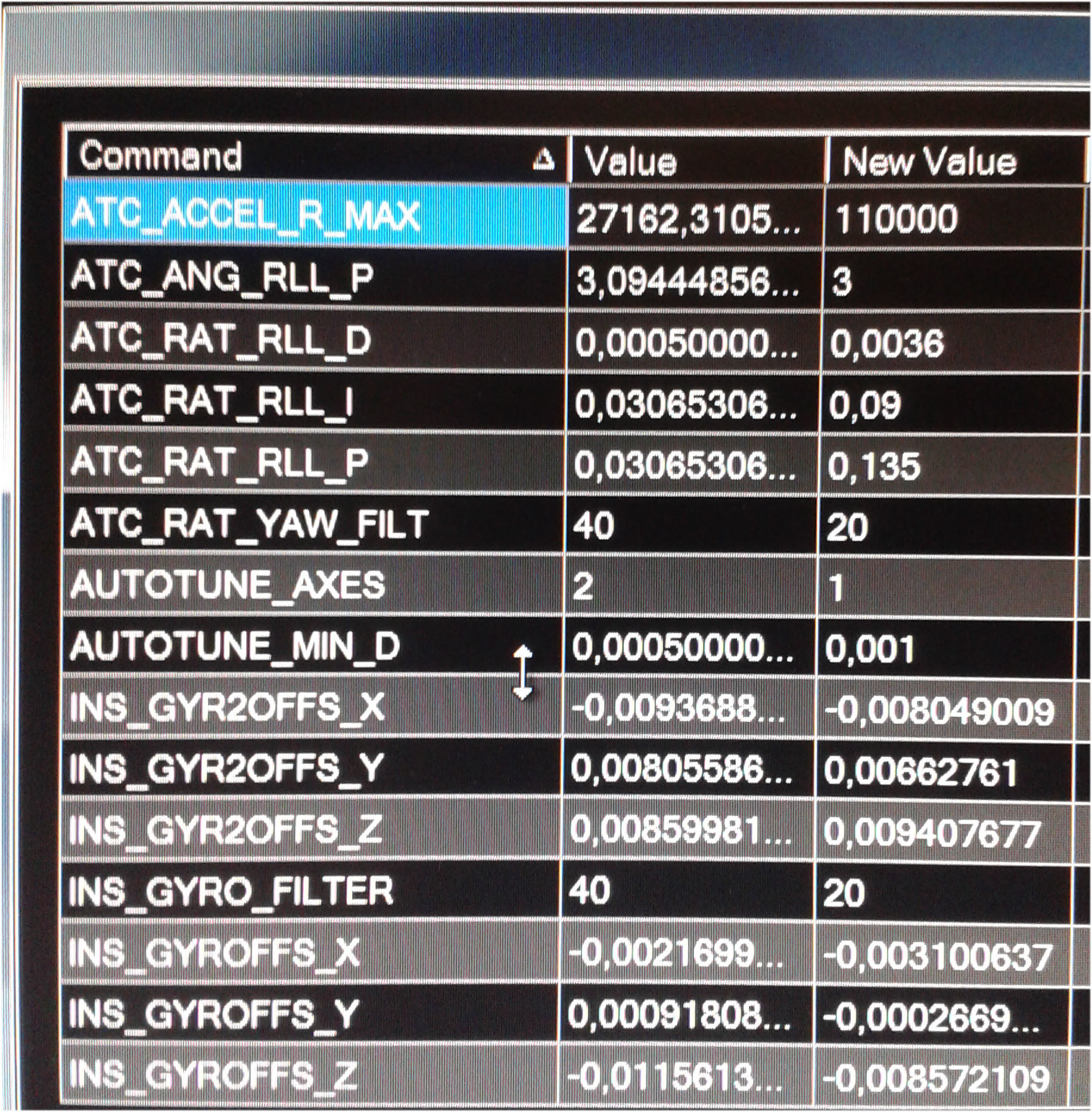
If you have a 250 quad then you will need to set this:
INS_GYRO_FILTER,40
ATC_RAT_RLL_FILT,40
ATC_RAT_PIT_FILT,40
AUTOTUNE_AGGR,0.1
AUTOTUNE_MIN_D,0.0005
For those that are having trouble getting autotune to start. Make sure your throttle is in the dead band. The other issue I have seen is caused by increased rate gyro noise stopping autotune from running (hard mounting may be causing this).
I am pretty much finished all the changes for the 3.4 release now so I am trying to kick into flight test mode. I will be loading 3.4 onto about 8 different copters and testing autotune so I hope to have more info for you soon.
Sorry again for the slow response but both Randy and I are struggling with time to get to everything. We are almost there now (I hope).
Could everybody with Autotune issues post a link to the logs with a quick description of what went wrong. This saves me trying to find where you described the problem.
Thank’s Leonard I’m going to give a test, I change INS Gyro from 20 to 40 and AUTOTUNE_MIN; the rest is as I had that don’t work like that, I have a doubt AT_MIN_D says out of range with 0.0005, no problem?
Im going to report results, my PR is hard mounted and IMU2 disabled.
Ok, I did my task,
I change yaw filter to 40 too.
First log is from Roll, no wind but a little space so many corrections, copter is a 270 racer with 2350 kv and hard mounted Pixracer (AUAV)
I switch to autotune and copter begin with short movements as did before I disabled IMU2 (because it’s looks more noisy) but now I allow to finish all the process, many little movements and at the end, longer movements, reverse than older fw on bigger cuads, when finish, I land and disarm saving autotune, change batt and test pitch over a bigger place but a breeze appears and I had to correct many times too and couldn’t finish because batt finish first so I landed and disarm saving values if they are usefull to analize. I didn’t have more batt and light to yaw and test results.
Thank’s Leonard, I go that way and try again, I did some test with 20 and 5 in the past but, time to time one motor didn’t arm, really I don’t know why, I calibrate esc. I try again, see what happens and share results again.
Many thank’s
Looks what happens when I change filters, first arm one motor don’t spin, second arm the four spin but not stabilize to take off, third time the same; perhaps It’s better to soft mount?
Sorry I’m a rock with this
Hi Leonard,
I tried another Autotune again today with the latest master from today with Paul’s EKF enhancements (8793c75) and 200g payload. It failed as usual. This time I used the settings you suggested above for 250 quads. Since it is bigger (Motor to motor: 400mm; AUW: ~1.35 kg; Battery: 4S; Motor: 920KV) it might be the wrong direction. What happed for the first time and what others reported here as well as, is that there were periods where nothing happend. I guess the settings tested by Autotune during theses periods were out of range?!
@Leonardthall
well, I also use ESCs with regenerative braking on my bigger hexas without any autotune problem. So I guess that’s not the case. I can’t imagine it it oneshot, since the one pitch autotune worked. So I still guess it is the power of the system and maybe some inital autotune settings.
No problem, it should be fast enough . K-Index is too high today for save flying… So hopefully tomorrow - or later today.
Do you need an autotune flight or just a short normal one?