Hello,
is there something to consider with the new version of arducopter about autotune a small quad. (ET-160, 300g)
Do i have to change the values like in this post: Autotune failed / Pixracer / overpowered
Thanks a lot.
Best Regard
anton
Hello,
is there something to consider with the new version of arducopter about autotune a small quad. (ET-160, 300g)
Do i have to change the values like in this post: Autotune failed / Pixracer / overpowered
Thanks a lot.
Best Regard
anton
Hi Anton,
As is usual with ArduPilot there are a lot of possible configurations so that it works across many vehicles. The settings proposed by Leonard in that post are generic ones that should help do an autotune in small powerful copters. As far as I know, those settings still apply as nothing major has changed between then and now.
I have a 210 size mini quad with a Pixracer. I should add that the FC mount is very compliant. I could not get a good Auto Tune after many attempts so went back to basics and tuned it manually. Arducopter defaults resulted in severe oscillation. After lowering Stabalize roll/pitch P and Rate roll/pitch P this was reduced but with poor responsiveness. The key in my case was to lower the Rate roll/pitch D to 0.002 and then return to Stabalize and Rate P and tune them back up. This is flying very well now.
Thanks for the answers!
I’ll give it a try with the Leonards values and autotune.
@ Dave
I have very similar values from manual tuning.
But i haven’t tryed autotune yet. I’m courios about it.
Here is my copter: http://www.thingiverse.com/thing:1918249
Best regards
Anton
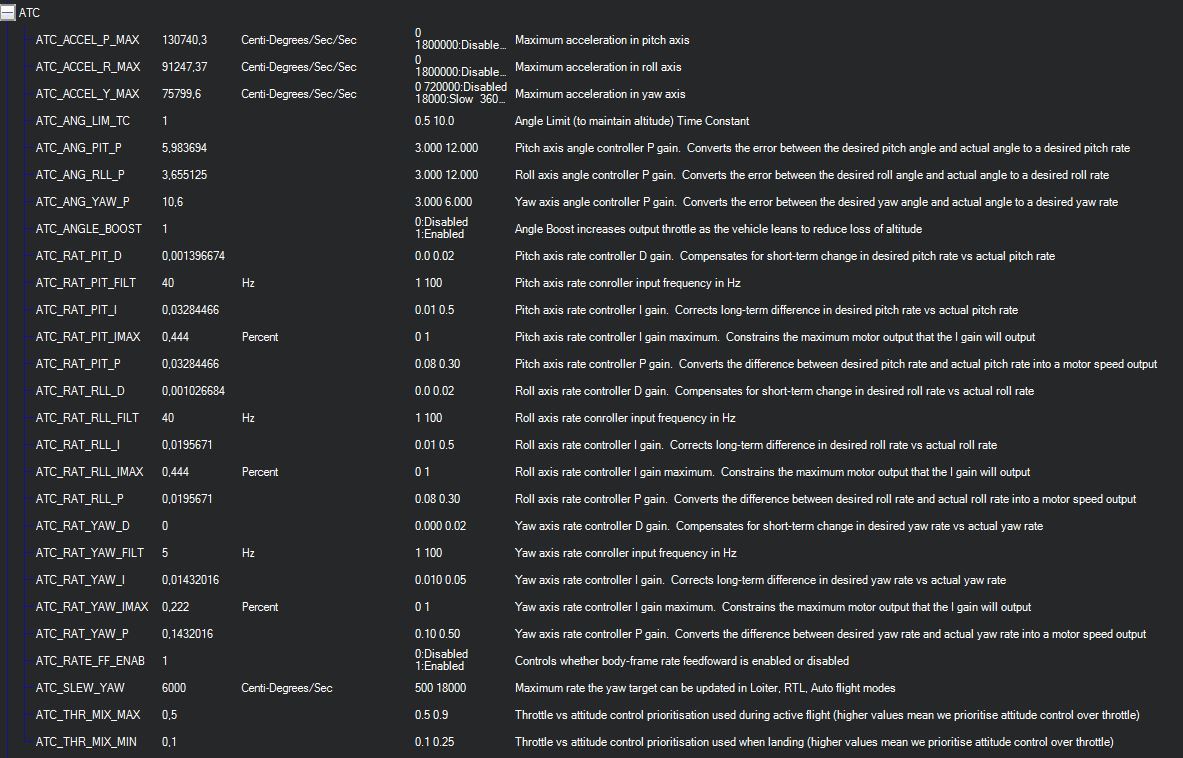
Here are my PID’s.
Pixracer, 250 quad, 2300 motors, 6x3 props.
My auto-tune w/ 3.4.2 was not really flyable… It put the atc_accel values very low, and the copter was unresponsive.
The same copter w/ 3.3.4 tunes very well… almost too responsive, but I got used to it and it worked well.
So, these PID’s I ended up with are a mix between values I got from several auto-tunes, plus some manual playing around w/ the numbers. Unfortunately this tuning screen doesn’t show all the values that are changed when auto-tuning… The atc_accel ones make a huge difference.
Also, is it normal for auto_tuning to give very different values on the same copter on the same day, one tune after another? Because I do get vastly different values for each tune… I can basically auto-tune over and over and eventually find one I like… But then I might as well manually do it.
Thanks a lot!!
I will try the values and also autotune when the weather is fine.
Best regards
anton
The quad I posted the PID’s for above is a 210 with 2205-2350kv motors and 5040 4 blade props. AUW with a 3S 1550mah battery is 460g. The FC is on a anti-vibe mount with very compliant balls. What I see as a common denominor for these mini quads shown here is a very low Rate Derivative. All my other quads (larger) start off flying reasonably well with Arducopter defaults. Lot’s of thrust with this setup. MOT_THST_HOVER is 0.168
Hi,
thanks for the answere!
I have MOT_THST_HOVER 0,13.
Hope to get autotune work.
Regards a.
Hello, today i got the small overpowered quad autotuned.
It has to be absolutely wind still. Then it works.
Thanks all!
Best Regards
Anton