can any one help me with this log I couldn’t get auto tune to work before one of the props broke inflight and caused a crash
Log File C:\Users\natch\AppData\Local\Temp\tmp2301.tmp.log
Size (kb) 849.080078125
No of lines 12217
Duration 2 days, 6:24:57
Vehicletype ArduCopter
Firmware Version V3.2.1
Firmware Hash 36b405fb
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = FAIL - Truncated Log? Ends while armed at altitude 4.58m
Test: Compass = GOOD - No MAG data, unable to test mag_field interference
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = NA -
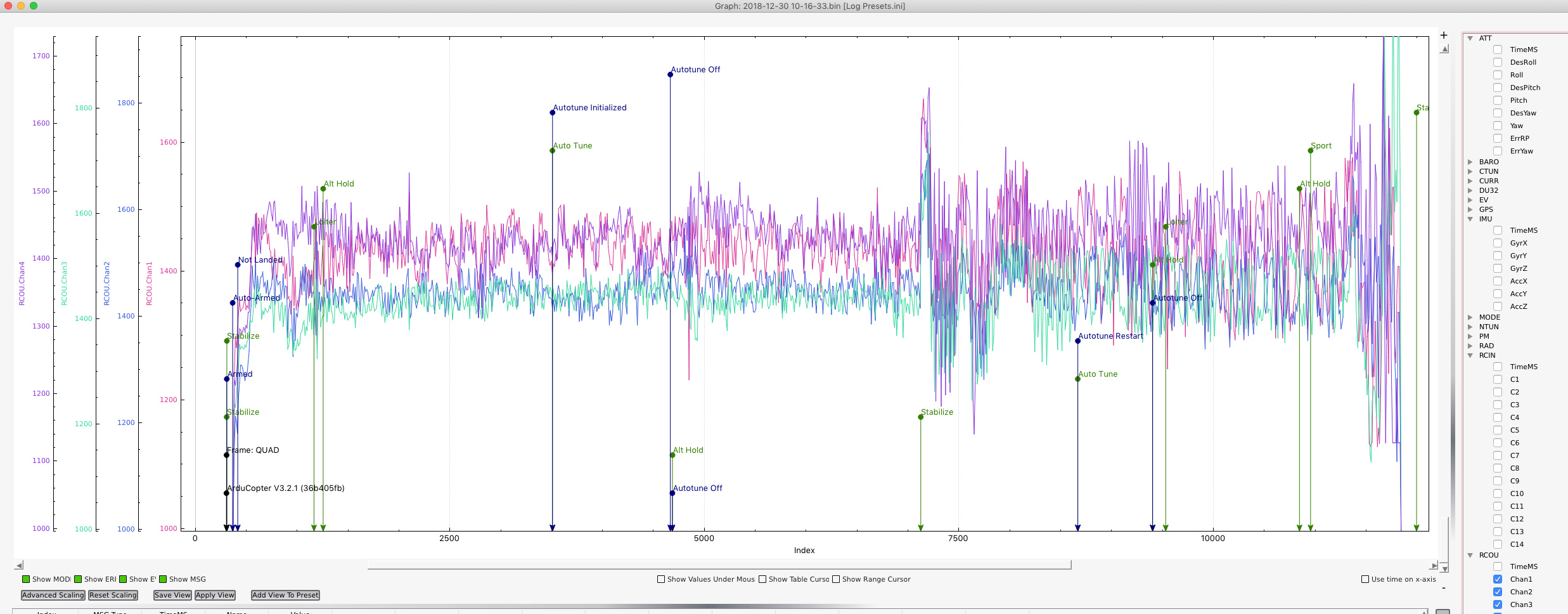
Test: Motor Balance = GOOD - Motor channel averages = [1425, 1447, 1442, 1432]
Average motor output = 1436
Difference between min and max motor averages = 22
Test: NaNs = GOOD -
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = GOOD -
Test: PM = GOOD -
Test: Pitch/Roll = FAIL - Roll (-175.79, line 12118) > maximum lean angle (45.00)
Test: Thrust = GOOD -
Test: VCC = GOOD -
We can help with a log file if you post the log file here.
That is just an analysis from Mission Planner.
So download the .bin file from the flight controller and post it here
I have the bin file downloaded but I cant figure out what software I should use to open it so that I can post it here I will go back to ardupilot website and find out
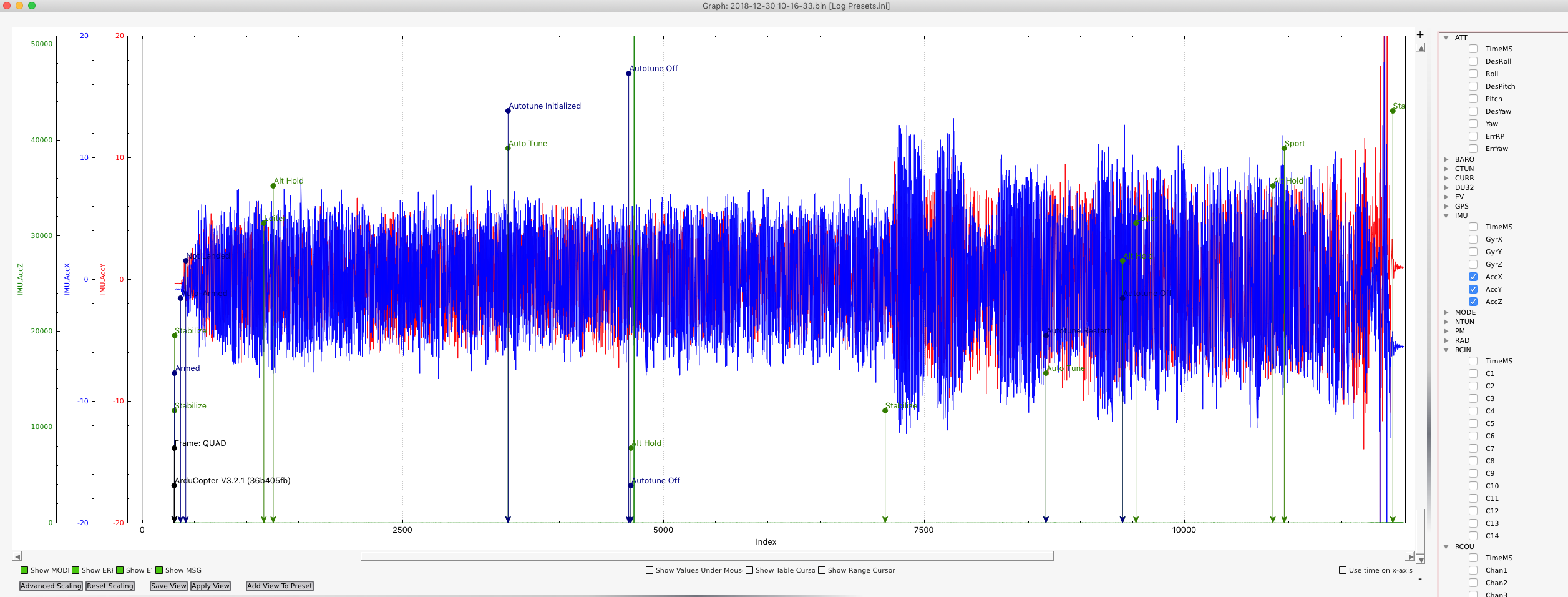
The first issue I see is excessive vibration.
The APM, and I am assuming you are using an older APM as you are running FW 3.2.1, would be having a hard time flying, let alone tuning.