The helicopter equipment is: Align T-Rex 450 DFC helicopter, FC Matek H743 WLTE, GNSS & Compass Mantek M10Q 5883, ESC Align, FrSky Archer RS receiver, FrSky Taranis qx7 remote control access, 3 servi Savox SH-0263mg, 1 servo Align DS520.
I installed the hall effect gyroscope and wanted to do the autotune, but even though I was in halthold and with the sticks in the center the function does not activate. I post the flightlog. Any advice?
Thanks
It activated both times you tried it. Then produced the message often seen when the craft is not in a tune state for Auto Tune to run “Failure to level, please tune manually”.
Thanks for the reply. Sorry for my ignorance. Is there anything I can do to make the autotune process proceed, or is it necessary to proceed manually? Thanks
Walter, let me take a look tonight. I may be able to spot why it isn’t starting the autotune. And give you adjustments to your gains to help it start the autotune.
Walter,
Looking at your log, it appears that your ATC_RAT_RLL_P and ATC_RAT_RLL_D gains may be too high. The D term is definitely too high.
I would suggest cutting the D term by a factor of 10 so use 0.0001 and then cut your P term to 50% of its current value. typically I don’t recommend that users use Rate P or D gain during autotune but it is ok as long as they are low values. Higher values can affect its ability to raise the gains because they may already be too high.
Also I noticed that you didn’t set your notch filter. It is tough to see if you have any vibration problems if your log sample rates are low. You need to set Fast IMU in the LOG_BITMASK param and then use the filter review web tool to tune your notch filter. You may not even need to do that because most of the time heli’s frequencies are easy to guess based on the rotorspeed and number of blades.
Fix these two issues and try it again. let me know if that doesn’t help.
1 Like
Good afternoon Bill,
I reduced the ATC_RAT_RLL_P and ATC_RAT_RLL_D parameters by 50%. I didn’t go beyond 50% as suggested by Ferruccio Vicari. And enabled fast IMU in the LOG_BITMASK parameter, but I found two problems, one in flight and one analyzing the flightlog.
In stationary flight in Halthold, enabling Autotune makes the helicopter move forward and it is necessary to recall it. In this way, Autotune is unable to start the sequence.
During the log analysis phase, as described here: Measuring Vibration with IMU Batch Sampler — Copter documentation, the three graphs are not displayed. What am I doing wrong?
I attach the flightlog: 2025-02-22 14-35-36.bin - Google Drive
Thanks
Walter,
I had a look at your dataflash log and parameters.
I can see that you do not have INS_LOG_BAT_MASK set to 1 or INS_LOG_BAT_OPT set to 4.
I believe that if you set those parameters to those values, you will be able to plot your FFT data after the next flight.
ETA: I would also select “Fast Attitude” in LOG_BITMASK.
Hi Walter,
I think i gave you bad information about the Fast IMU Logging. The webpage uses a different feature. However you can still use Ctrl-f in mission planner and use the FFT tool. this will show your vibration results. I have included a pic below of the results
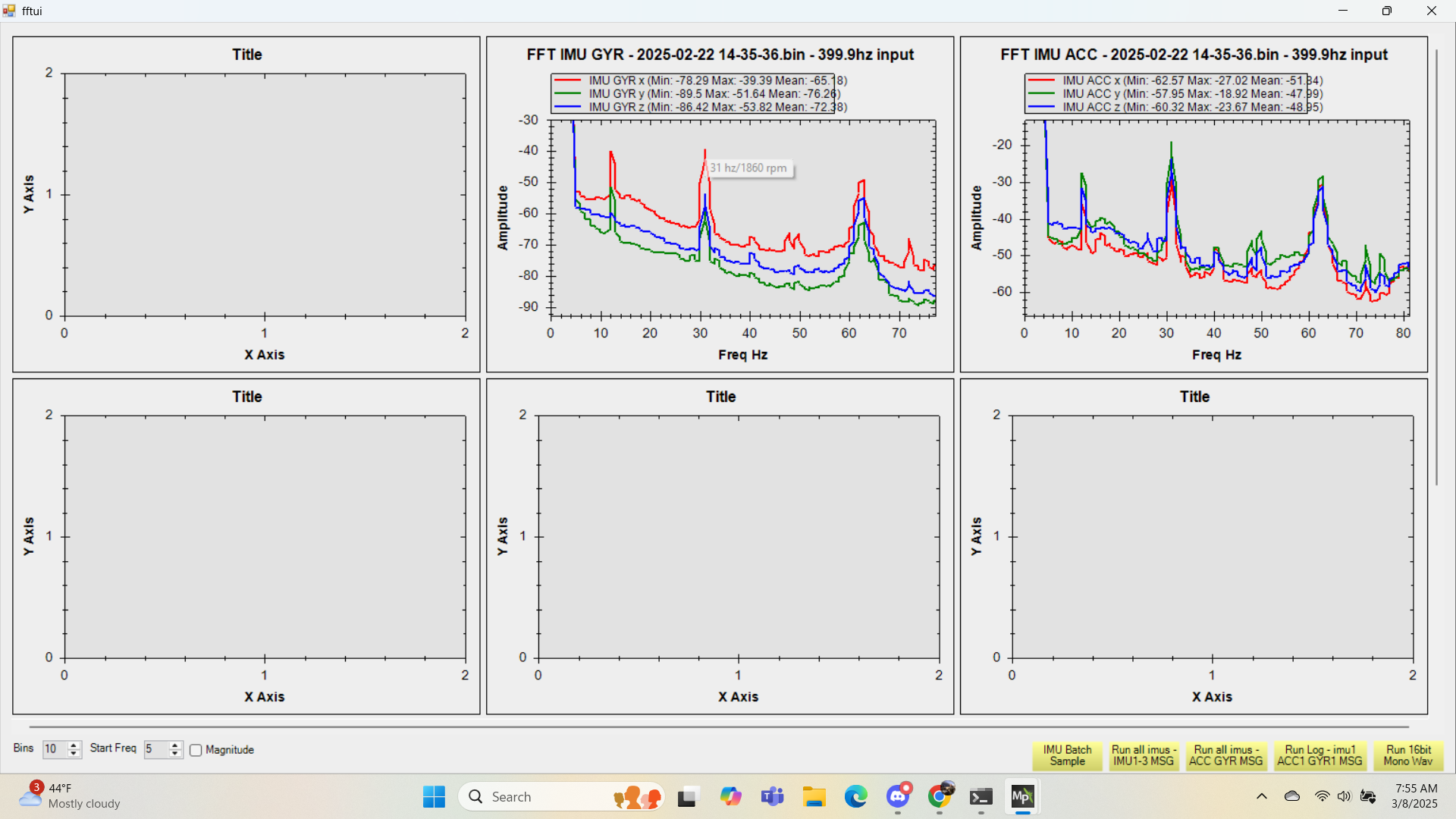
So it looks like your primary vibration is shown at 31 hz which is probably your rotor speed and you can see a second peak at 62 hz. This is what you want to set the Notch filter to suppress.
You also have a peak at 12 hz but I’m not certain where that is coming from. So let’s just focus on using the notch filter to suppress the rotor frequency based vibrations.
First enable the harmonic notch by setting INS_HNTCH_ENABLE to 1. Then refresh your parameters so you can see all of the other settings for the notch filter.
Set the following parameters
INS_HNTCH_MODE=2 - we will use this mode since RPM is being measured directly
INS_HNTCH_FREQ = 15.5 - I have set it to half the rotor speed so it will start the notch filtering during the rotor run up.
INS_HNTCH_BW = 10
INS_HNTCH_ATT = 40
INS_HNTCH_HMNCS = 3 - this will suppress the first and second harmonic
INS_HNTCH_REF = 1
when not using autotune and just hovering the aircraft, can you release the pitch/roll stick and the aircraft will not drift. If you can’t do that in normal flight then you have to fix your AHRS trims so that the attitude the aircraft hovers at is zero for the controller. The controller is looking to hold zero degrees pitch and zero deg roll when hovering. Read the section of the wiki on first flights and setting the hover trim First Flight Tests — Copter documentation
1 Like
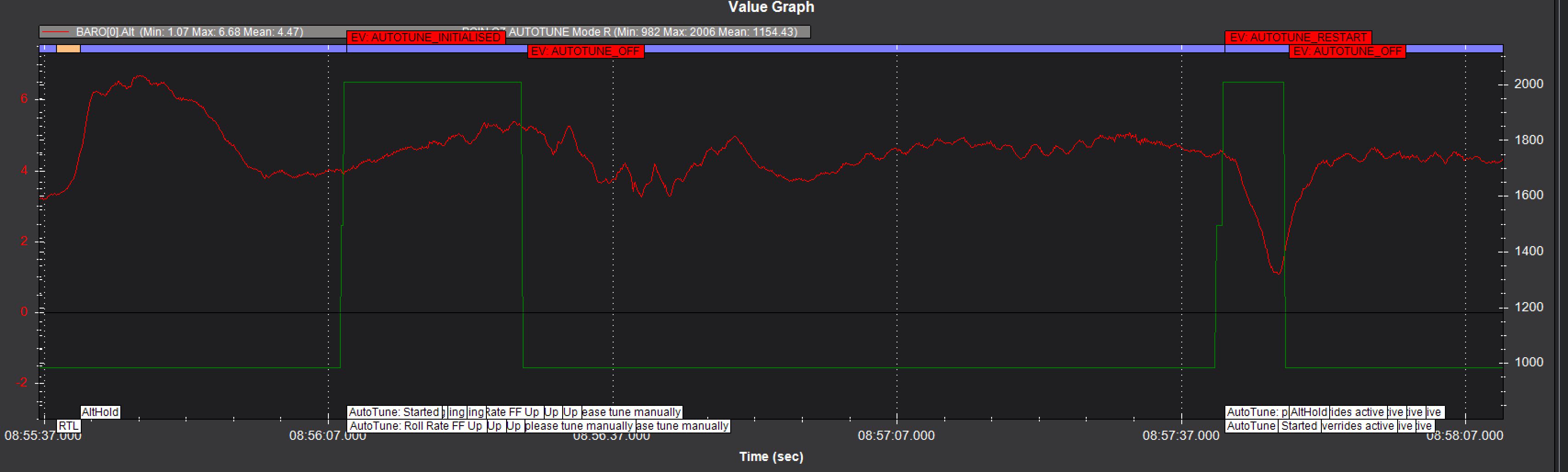
Finally I managed to solve the problem with the hover trim and I started the autotune sequence by completing the first two phases of the sequence reported in the wiki (AutoTune — Copter documentation). The third phase, (autotune_axes:1; autotune_seq:2; autotune_gn_max:1,8) despite having progressively reduced the atc_rat_rll_d and atc_rat_rll_p parameters to zero, starts, but after a while I receive the “autotune failure” message.
What should I do?
I attach the flightlog. 1980-01-06 08-41-39.bin - Google Drive
Thanks
Hi Walter, The autotune failure that you are receiving is due to the max frequency limit being reached before it could determine the max gain. The default max frequency was set to 70 rad/s. For 450 size helis, it needs to be 100 rad/s.
also you have a 13 hz oscillation that I think is causing issues with the autotune code. So I will ask you to set up your second INS notch filter to squash it. Here are the settings
INS_HNTC2_ENABLE 1 after setting this, reboot controller.
INS_HNTC2_MODE=0 static notch
INS_HNTC2_FREQ = 13
INS_HNTC2_BW = 6
INS_HNTC2_ATT = 40
INS_HNTC2_HMNCS = 1
after setting this filter and modifying the autotune max frequency, run the autotune flight again.
@bnsgeyer Today I successfully performed the third step of autotune with the parameters you indicated. Unfortunately the fourth step (autotune_axes:3; autotune_seq:4;autotune_gn_max:1.8) starts, but fails almost immediately.
I attach the fightlog.
Where am I going wrong?
Thanks
Hi Walter, sorry I didn’t get back to you right away. It wasn’t your fault. The test couldn’t complete because the data it needed was at a frequency lower than what was programmed. I would suggest setting the Freq_min to 1 and the freq_max to 40 and run the autotune test again. Just be aware that the aircraft will drift more because the min frequency was lowered.
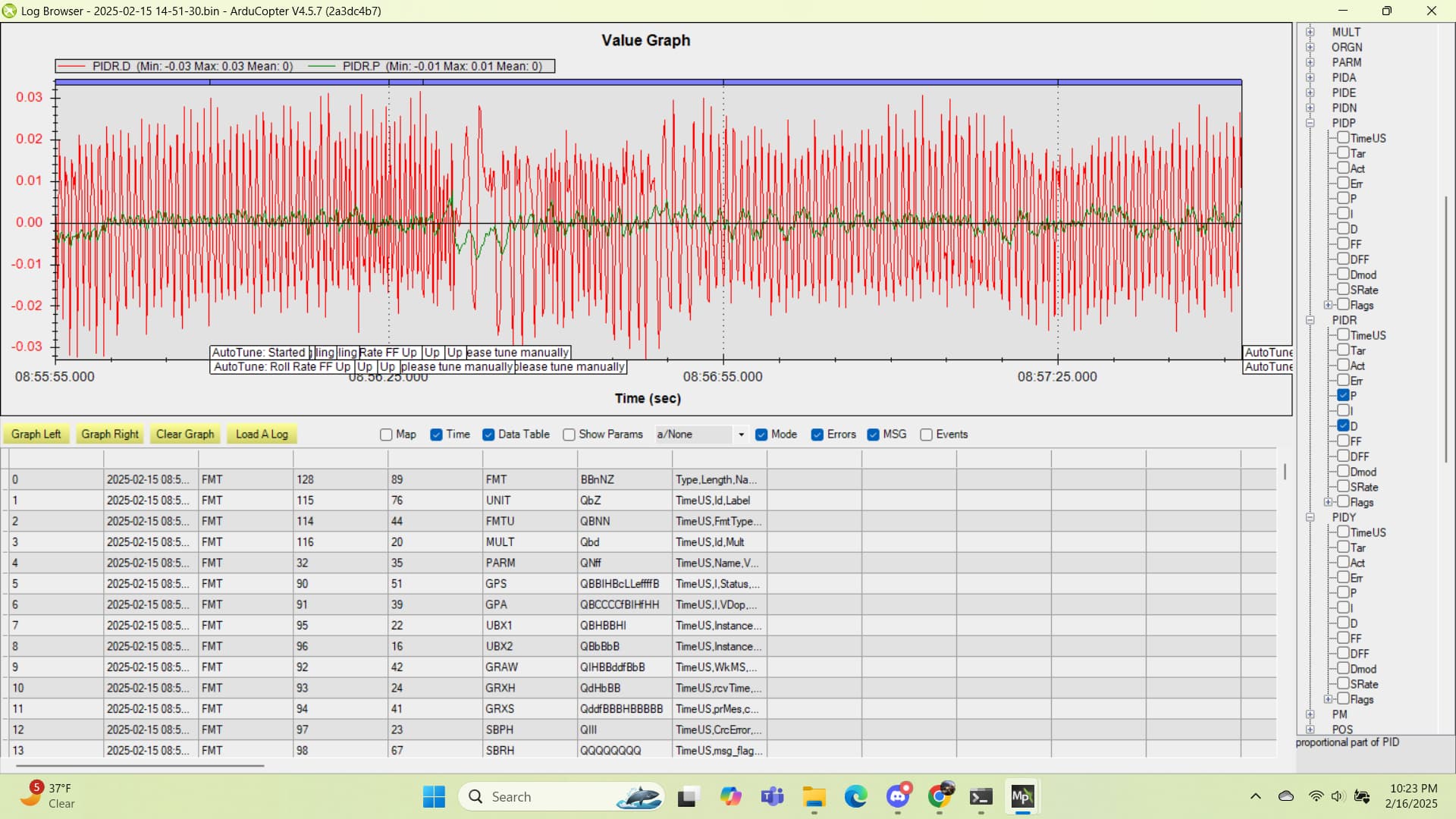
I would be interested in seeing your tuning log for the rate P and D tuning just out of curiosity.
1 Like
Thanks @bnsgeyer, I apologize for the inconvenience I have caused you. Unfortunately I do not have the skills to do it myself. I accidentally deleted the flight log for the P and D speed adjustment. Next Saturday I will reset the atc_rat_rll_d and atc_rat_rll_p parameters to 0 and perform phase three again, then I will change the minimum and maximum frequency as you suggested and perform phase 4. Finally, I will send you the two flight logs. Ok?
Thanks
I just looked at the atc_rat_rll_d and P parameters, but they remained at 0. So phase three has been completed, but the parameters have not been changed. This seems strange to me.
Thanks
Walter,
Partly why I wanted to see the rate P and D tuning. try running the roll rate P and D tuning and send me the log. If you have the pitch, I wouldn’t mind seeing that one as well.
Hi @bnsgeyer,
Today I completed the autotune from step 3 to step 6. It seems to me that the parameters have changed, but I would be very grateful if you took a look at it and told me what you think.
I then flew in “stabilize” and by feel it seemed good.
I leave you the link to the flightlos folder.
Thanks