I’ve run autotune (3.4-rc4) twice over the past two days on a new frame, and received results that are substantially different from each other. I actually have no complaints with how my quad flies, but am curious how the results can be this different, and whether this is within the expected accuracy of autotune.
Specifically, I am curious about the pitch gains, which dropped by a factor of 2. Is this typical from run to run? Should I run it again?
Parameter 9/17 Value 9/18 Value
ATC_ANG_PIT_P 6.926874 3.26085
ATC_ANG_RLL_P 10.74586 12.31241
ATC_RAT_PIT_P 0.1108658 0.06274559
ATC_RAT_RLL_P 0.09007517 0.07888731
Every AutoTune I have ran were completely different from each run.
I once had those first numbers in the first two columns 12.5/ 12.5
Next run they were 3.5/ 3.5 and the last in the set was 6.5/ 6.5
So yeah, it is going to be totally random.
And it is “nice” to see that effect continues.
One day I read from Leonard (autotune dev) that is convenient to repeat autotune if you are far from ideal tunning to have a better accurace avoiding the other bad tunning axe making noise, perhaps the case.
I tried tuning the pitch gains one more time, with another fairly dramatic shift, especially in the angle position gain:
Parameter 9/17 Value 9/18 Value 9/23 Value
ATC_ANG_PIT_P 6.926874 3.26085 13.31808
ATC_RAT_PIT_P 0.1108658 0.06274559 0.095409
I can’t say that any of the gains has felt particularly sluggish or underdamped, so I’m inclined to just leave things where they are at. But I do wonder about these huge variations.
Upon reviewing my logs, I do see a lot of overshoot in the pitch axis. Thinking back now, I do recall that after I would recenter my pitch stick after flying forward, the quad would suddenly jerk back a little bit.
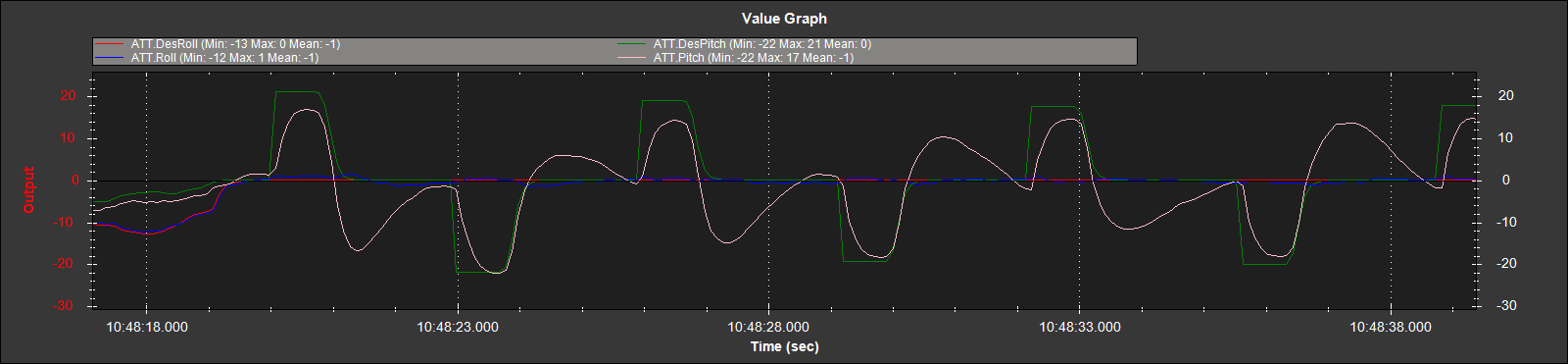
Is this expected behavior? See below for a plot of the pitch response (pink) to pitch commands (green) during autotune. The overshoot is quite dramatic.
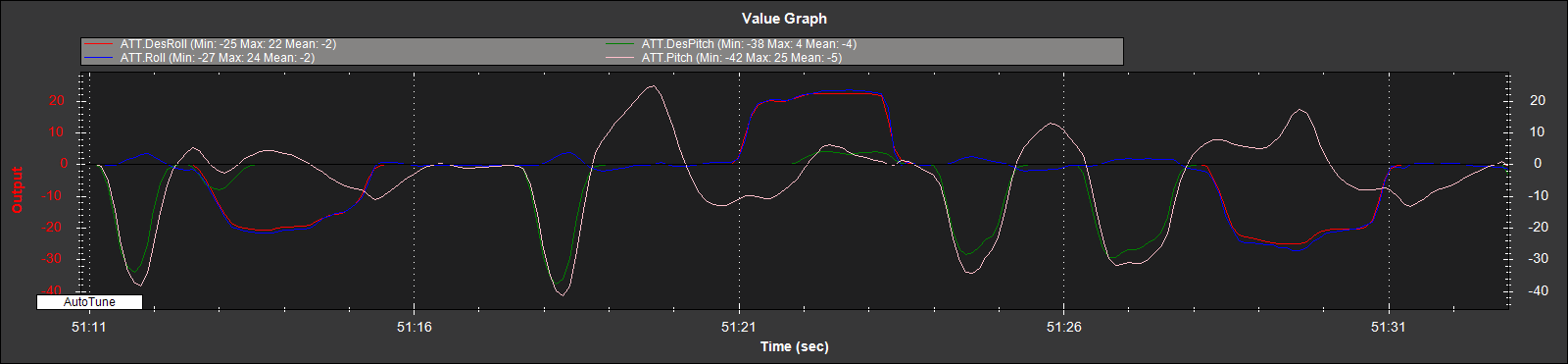
The next plot shows the pitch and roll while I’m flying after the autotune. The roll (blue) is always locked into the command (blue), while the pitch (pink) always shows a lot of overshoot when returning to zero. It would be useful to know what is “normal” behavior. The pitch overshoot does have the result of slowing down the quad’s speed after forward flight, so maybe it is intentional.