Hello all,
I’m coming to the forum with quite a bizarre issue. When performing an autotune on the pitch axis, all appeared to be well for the first minute or so. Then, for some unknown reason, motors 1-4 randomly stopped spinning (the top motors of an X8), still being kept in the air by motors 5-8. Knowing that something wasn’t right, I toggled out of autotune and came in to land, when the drone had an attitude upset and fell from an altitude of roughly 10m.
At first, I assumed hardware failure, although when I tested all electronics afterward, all 8 motors spun without issue. Whilst temperature protection could’ve been a factor, I don’t think that it would’ve kicked in (the ESC threshold is set to 140C).
Some important things to note here:
Autotune worked flawlessly on roll and yaw
We already created a baseline tune before starting an autotune
The pitch axis has a sprung mass, where the battery and payload ride on shock absorbers
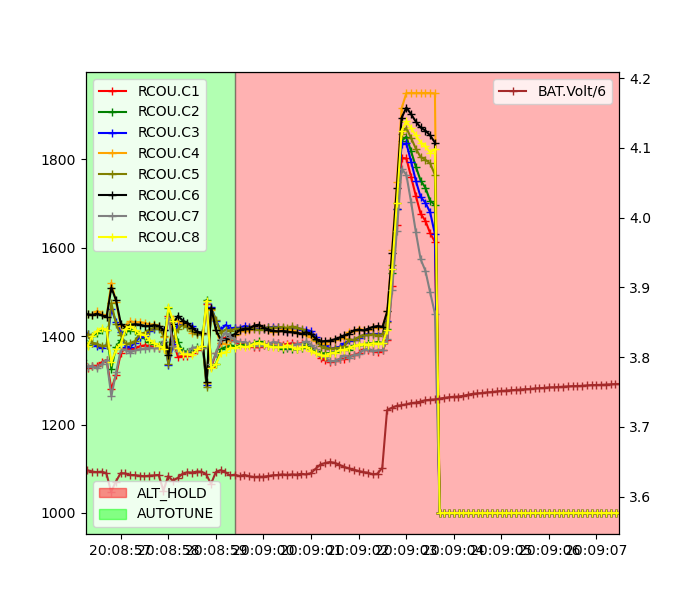
- This has the added effect of acting as a mechanical D term, hence the strange step response.
I’m hoping the log provided can highlight something. I’ve had a look and can’t find any abnormalities. I’ve since rebuilt the copter with the hopes of trying again, so any potential insights would be greatly appreciated.
The FC was still sending signals to the all ESCs/motors. There’s a point where the average of the motor outputs jumps up noticeably, so I’m going to assume this is when the top motors stopped spinning and the FC was just trying to make up for it.
This suggests the motors all stopped before it was on the ground. (But you probably knew that already )
It would help if there was proper current monitoring. But based on the PWM values to the motors I’m thinking this beast is a bit of rocket.
I’m going to guess that the top motors were on one 4-in-1 ESC, and the lower were on another. If that’s the case and you lost all 4 motors (and then the other 4) then I’d be looking for an issue with the power distribution to the ESCs. Cold solder, burned capacitor, something like that.
I’m not sure if desyncs could be an issue here, but I don’t know. Maybe somebody smarter than me could answer that.
That was my first thought. I’ve had a somewhat similar issue where a solder joint completely detached but cable tension pressed it against the pad so the connection was still there… until it came loose. But when I did motor tests later it was back in its connected state.
Woah! The whole spring action looks quite interesting.
Looks like the drone has quite a lot of moment of interia in one direction (pitch? maybe) due to big mass being away from center of rotation. I worked with a similar configuration but fairly larger scale(30 inch props)and it was quite difficult to tune. No success with autotune too, had to limit accel_max and rate_max for the moment heavy axis quite aggressively.