Pretty new to everything. Been through the entire Wiki several times.
Had hex in the air and flying well under AltHold and Loiter.
Autotune on Roll axis performed really well with nothing out of the ordinary. Landed, Saved PIDs, Switched out batteries, and changed to Autotune Pitch axis.
Copter began autotune normally but after about a minute, suddenly dove straight into the ground.
It would have really helped with more extensive logging as @fnoop pointed out.
No RCout or RCin, and your voltage/current sensor is not setup.
I did notice you still have ATC_RAT_RLL_FILT and ATC_RAT_PIT_FILT at the default 20.
A bit more information about your setup would also help.
Size? If your running 13" or larger have you read the wiki on changes to _FLT settings?
Motors?
Props?
Weight?
It might be interesting to also have a look at the tuning flight that worked.
Still didn’t have logging set to nearly all though like I thought.
Went back in to check the ATC_RAT for Roll and Pitch and neither was set to 10 like I thought.
Pixhawk 2.1 on a SteadiDrone Hex platform
Running 2 5s 6000 mAh batteries
ESC: Turnigy 40A
Motors: KV 380
Props: 14 X 4.7
Going back through params again to make sure all are set where I think they are and where they should be.
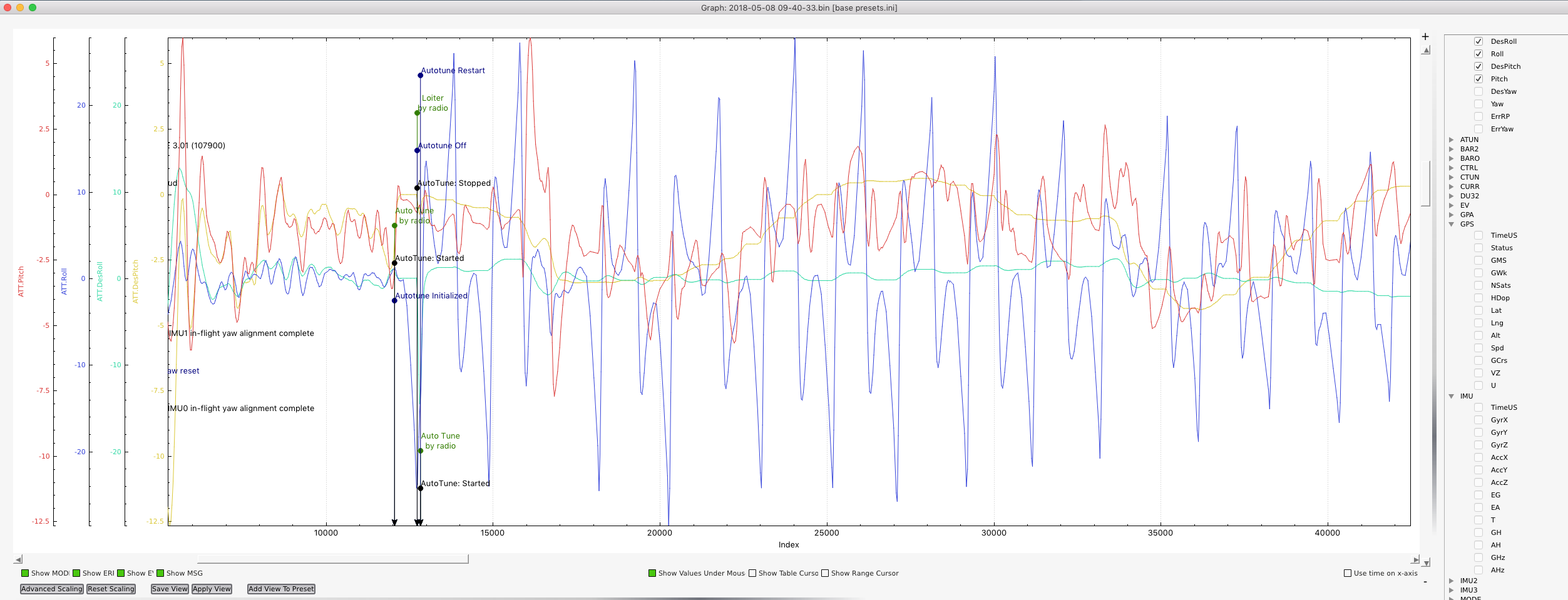
Looking at the Desired to actual movements in the ATT messages I see the same dramatic overshoot at the start of the Autotune.
I think in this case the mass of the batteries, I am assuming they are mounted left and right, was enough dampening to prevent it from tipping, until the tuning was able to dampen things down.
In pitch however there was no such dampening and the result is what you witnessed.
Dropping your _FLT values should solve the issue and allow the Autotune to operate without crashing it.
Rebuilt everything that was busted with the flight this morning. Took off the props and spun the motors up. Motor 3 will not spin up. After reviewing footage in slow motion it appears that motor 3 quit spinning.
Still without the logs its hard to say. Will have to test ESC and motor to see which is bad.
To test for de_sync put your throttle on a Tx switch.
Lash down the copter and take cover.
With the switch set to be 0 throttle low and max throttle high flick the switch from low to high a few times and see if you lose sync on a motor.
For big copters this is not for the faint of heart.
This is a classic setup vulnerable to desync. Make sure you don’t have any type of active braking/damping enabled in the ESCs as you’re pretty much guaranteed to get desync. Also worth considering better ESCs like hobbywing which are better known to perform without desyncs at low KV.
Ah, well that’s your smoking gun!
I’ve never been brave enough to try this myself! I remember reading somewhere that you can swap the props round and this will push it into the ground rather than lift off?
I used to use this method for calibrating amperage draw before I got into Mauch power modules.It actually felt quite safe from just a few feet away.Move the props one motor round and flip the props drives it into the ground.Impressive on a bix hexa.
Replaced ESC and Motor # 3 and now have all motors spinning(I did not replace both without making sure they were both bad)
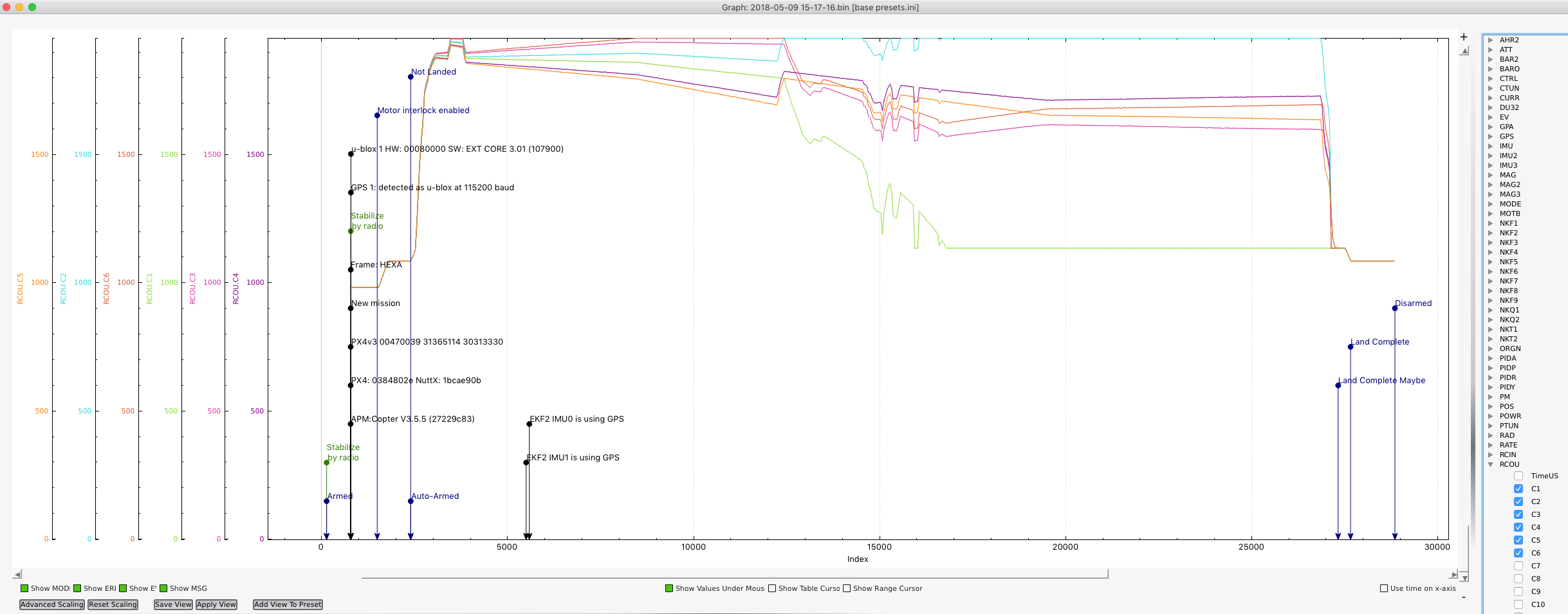
Props off bench test with motors spinning up. When I review the log it appears that the motors are not responding in the same way. Am I not reading the log correctly? Does C1-C6 not represent the individual motors in RCout?
Like I said, I am still new at reading these log files so just checking on what I need to be looking at.
But when you are bench testing be careful not to rotate the copter as that will change the outputs.
Although if you did that I would have expected top see 3 motors down and 3 up.
You have C1 shutting down and C2 going to Max.
Try the same test but do each axis individually, so you can see in the graph the level for each motor.
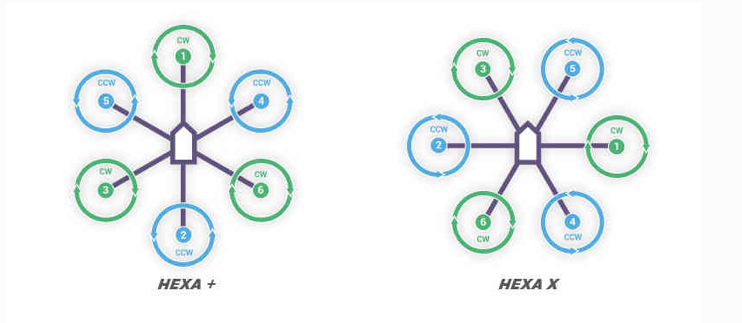
Then compare that to the motor diagram in the Wiki and see if they are doing the right thing.
It would appear that C1-C6 correspond to motors 1-6 respectively.
Tried bench test again. This time I put a piece of foam over the Pixhawk thinking that even with props off I was getting some wind to the barometer. It did help the RCouts to be a little more consistent.
Then tried what mboland suggested and tried to isolate each axis. Log file is for four “flights.” Started with throttle only then went to yaw, pitch, and roll. Motors off and disarmed after each flight.
Crash on pitch and roll.