yesterday I tried to autotune my big x8 (bad idea ) with KDE 7208 110KV Motors and Kde 75A esc (setup for the 7208) with 27" KDE Props.
12s
AUW was 25kg
The behavior before autotune was not rock solide, but it was flying and I thought it would be ok to switch to autotune.
After 5 minutes of tuning, I had the impression that it gets more stable.
But then the drone turned on yaw axis and droped altitude. I switched instantly to althold but I couldn’t trap it.
The feeling was like the batterie gets to empty, but this was not reason.
I had a realy hard “landing” with broken landing gear and all of the expensive KDE props.
The only mistake I made was that it set “AUTOTUNE_AGGR” to 0.10.
Clould somebody please have a look at my log file?
So I asked myself why!? Maybe problem with motors or esc!?
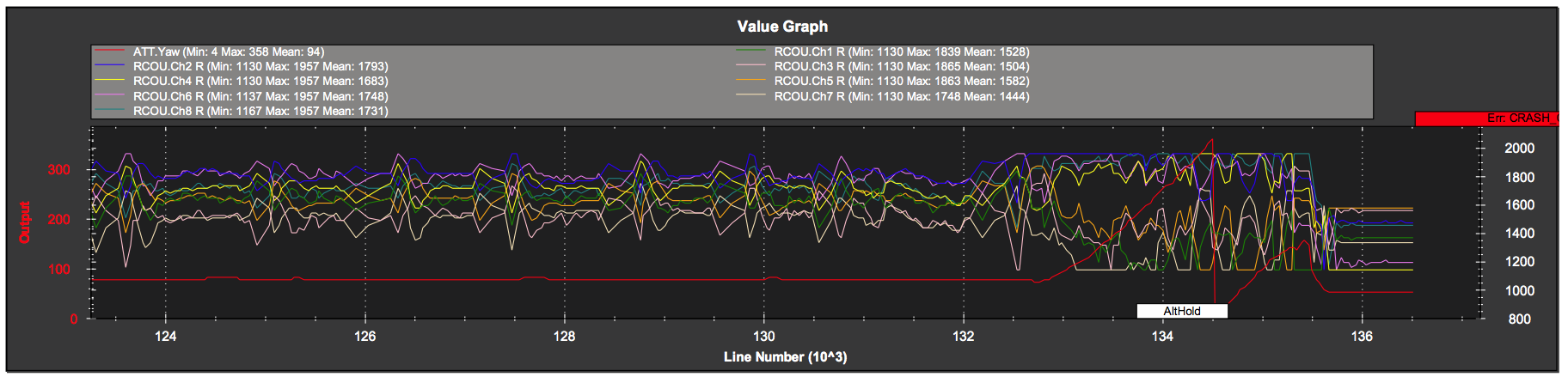
I don’t think so! As I can see in the follow picture, the copter tried to do a “fast” yaw movement.
My theory:
The hard yaw movement was desired by the Arducopter. So 4 motors where almost stoped. The motor power was not enough to hold the altitude.
But the question is why?
Now the lucky part
It isn’t a DJI flightcontroll.
It is a Ardupilot. Open source FC with a incredible community.
Everything is logged and there is a great community with lots of friendly people who will help me.
This is what i always tell my friends, when they ask me why I like ardupilot.
 ) with KDE 7208 110KV Motors and Kde 75A esc (setup for the 7208) with 27" KDE Props.
) with KDE 7208 110KV Motors and Kde 75A esc (setup for the 7208) with 27" KDE Props.