Hi all,
I need help because its some weeks I’m trying to autotune this light copter:
motor 1306 2650 kv
prop 5" gemfan 5030
battery 2S
weight 220g with battery
AC firmware 3.5
I’m starting with ROLL autotune only as is suggested, but I’m not sure the starting PID are good to make it works properly.
What’s yours suggestion for the starting PID for the AUTOTUNE process in my case?
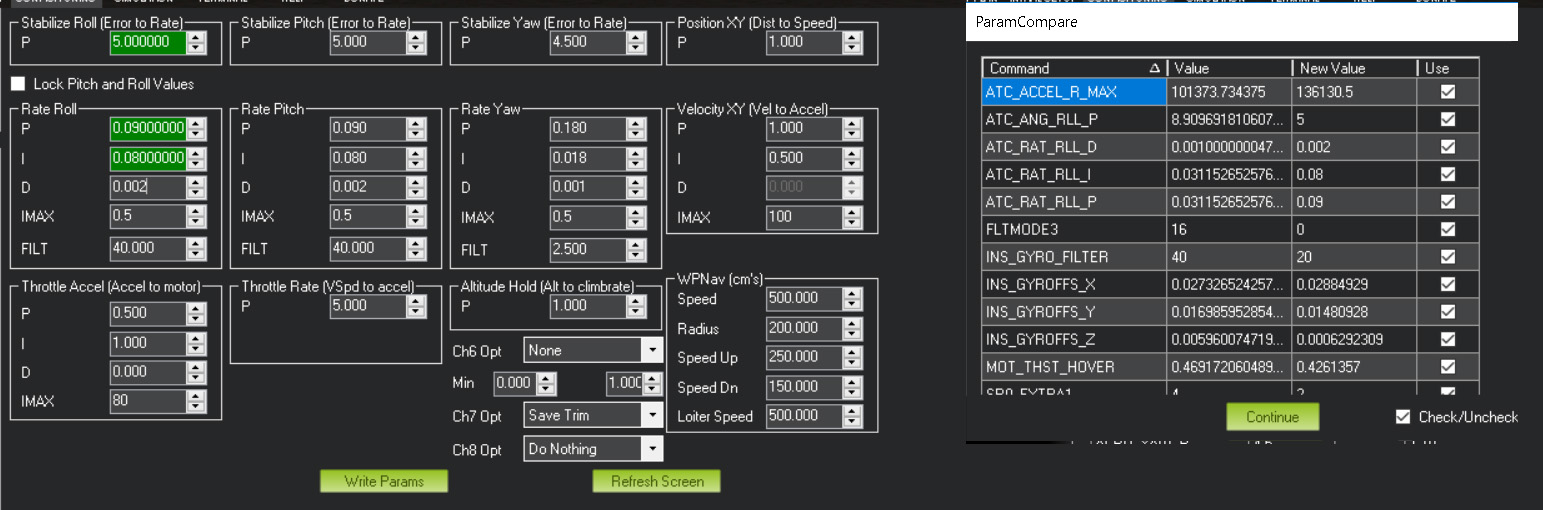
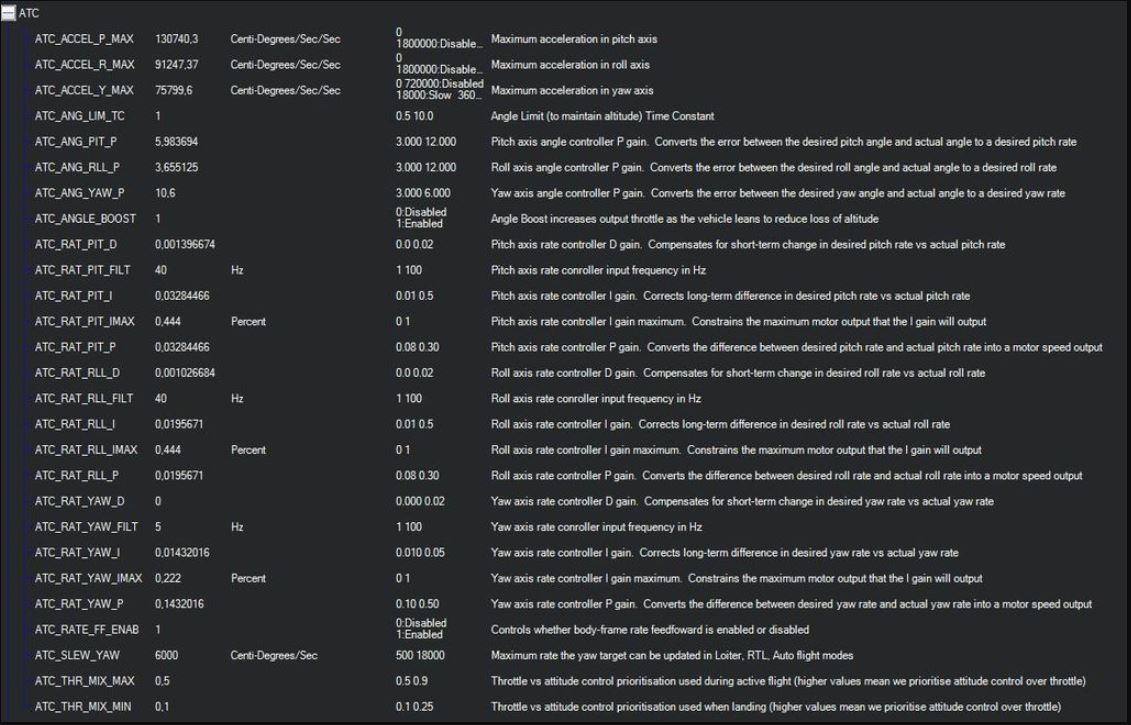
I also see others parameters changed by autotune like ATC_ACCEL_R_MAX but I don’t have any clues how to set it, please help
In this picture on the extended tuning tab you can see the starting PID, and on the right there is the new roll PID parameters found with the autotune
this is the log, in the middle there is the autotune for roll axis that gives the values on the right of the above picture
The autotuned Stabilize Roll always are too high in my opinion ( 9-11 )
The autotuned Rate Roll P/I are too low (± 0.03)
I’m using AUTOTUNE_MIN_D 0.001 but now I want to try 0.002 and see if this could help.
In this log I’ve used AUTOTUNE_AGGR 0.075 bacause when I was using AGGR to 0.1 the stab Roll was going high as 11.
I’ve started to set Filters to 40 also to the GYRO to see if this could improve (in this log are set to 40) do you think its right? also based on the vibes measured?
Please ask me any further details, or to make a new autotune based on new ideas, because I’m quite lost in autotune ATM
These values look fine to me - I have a 350mm quad with air gear 200 (2205 2000kv) on 6" props. My stabilize roll/pitch are 18, P/I values around 0.04, D values around 0.001-0.002 and it flies great. I would keep your min_d to 0.001 and keep the AGGR to 0.1 - you want the values nice and tight for something this small. Your ATC_ACCEL_R_MAX looks a little low maybe - mine is >200000, I’ve noticed this can have an effect if it’s too low.
Generally I’ve found the autotunes in 3.5-rc10-rc11 are much better than previous releases.
I’m still thinking I have some other parameters to fine tune to have proper autotune on this small quad, it seem too much trying to correct itself with poor autolevel authority.
In particular looking during the autotune process the twiching angle seems very small, so tiny inclination if I compare to medium size quad I’ve made the autotune. What parameters I could change to raise the incination angle for the autotune ?
I think a better description for what people with <=250 size quads that are running Arducopter would be “Racer size”.I haven’t heard of anyone actually racing them. I have no interest in racing my 210 PixRacer based mini quad but I do enjoy flying it in assisted modes, experimenting with Auto Missions and generally having Arducopter capability on a very robust vehicle.
Has anyone tried manually tuning?
I ended up w/ values 2 or 3 times higher than auto-tuning was giving me. I ended up w/ roll and pitch being about .1 and .12, while autotune was giving me values between .03 and .08.
It’s much more responsive than after auto-tuning, but still not as tight and responsive as I’d like.
My filters are at 40hz, my atc_accel are over 200,000.
But it still isn’t nearly as responsive as a betaflight controller on the same frame/motors.
I spent more time manually tuning today.
Rate P and I are still at .1 and .12 for roll and pitch. D is .001.
I might actually still need to make these higher. it’s not oscillating, and it’s still not as ‘tight’ as I’d like it… (It’s hard to explain, but in BF, it’s like the copter is an extension of my thumbs. In APM, it’s like I’m controlling something that is floating around in the air… (Which I am… but I don’t really know how to explain…))
So today, I increased stab P to 14 for roll and 15 for pitch.
And Acro_RP_P to 20, with a little bit of expo. (Default is 4.5 and it says the max is 10, but that was still slow, and it’s working w/ 20) (I like acro to be a little scary)
ATC_Accel are up at 250,000 (Why does auto-tune lower these? Isn’t this sort of arbitrary and just about how fast the pilot wants it to respond?)
Increased the angle limit to 80 degrees.
Now it’s about as fast as I’d like.
250 size quad. 2350kv motors. 6x3 2 blade props. 590 grams (with a big 2500mah battery).