For Arducopter quadrotor, what do these two flight-modes do? I googled it and searched forums, didn’t help, so please forgive my ignorance.
Thanks in advance.
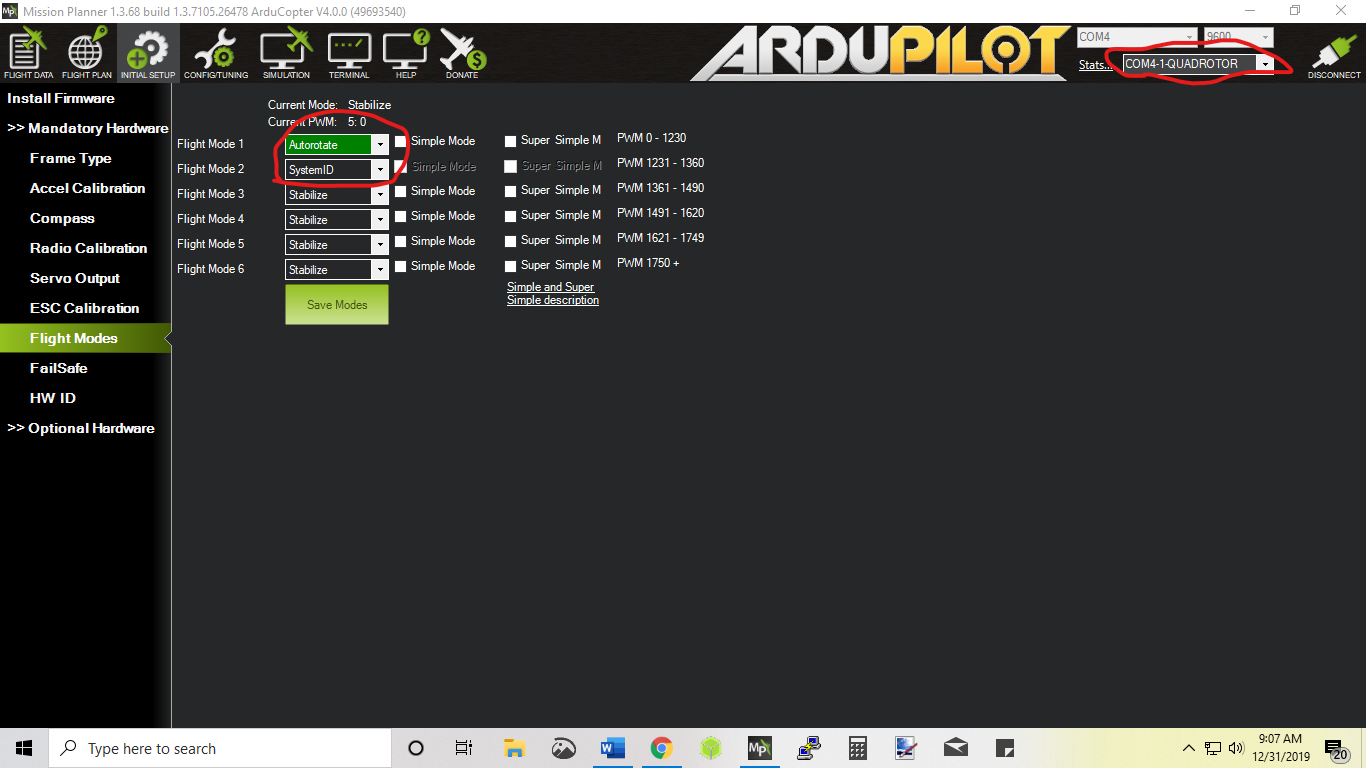
- Autoratate is for traditional helicopters. Just google for “Helicopter autoratation” and you will find out what it is.
- SystemID is for mathematical model based system identification. You need to know about control theory to understand this one. Not meant for normal users without technical background knowledge.
1 Like
To add some more detail, here’s the wiki page for system-id. Hopefully we can eventually fill out the wiki with more information on how the outputs from this “system identification mode” can be used to improve tuning.
I’ve added a wiki to-do to explain auto-rotation. Maybe we should add, “(Heli only)” so that normal users can quickly know that this isn’t for them.
I knew about it on traditional helis, couldn’t figure out how it applied to multi-rotors though. Thanks for the info.
@rmackay9 is there any progress on version based wiki pages?
The changes for 4.0 will confuse a lot of 3.6 users.
There’s some good progress on making version based parameter descriptions on the server side (PR).
3 Likes