You need 2 ground modules. You could use an FTDI adapter on the Air module as a Ground Module. So, with this solution you need 4 radios 2 of which connect to the laptop running Mission Planner just like the photo shows.
1 Like
yes brother dave i have two ground modules and two air modules

so i need an ftdi adopter now too? or shouuld i just connect both ground stations to laptop and air module to both boats pixhawk
Yes, that’s what I said.
oh great i will just try this and update you thank you sooooooooooooooooooo much for giving me time for my solution
Just make sure each pair of radios is on a different NetID and it will work. I assume your laptop has 2 USB ports? If not you will need a hub.
1 Like
yes i have asus tuff 15

it has 3 ports actually can you tell me where is this net id and how to chhange net id
i have pixhawk 2.4.8 and its oldest one i am just a week behind presenting my project to university i hope i can stay in contact with you for a week ,
so once i connected my ground module
now next step is selecting any com and d the different numbers next to com >?

Plug One radio into the laptop and power up the boat it’s connecting to. Then is Mission Planner select the Com port the radio is on and 57600 baud but don’t connect.
Then go to the Setup>Sik radio screen and press “Load Settings”. Parameters should load in both Local and Remote screens. On the Local side Change the NetID to a different number, press the “Copy Required to Remote” button and then the “Save Settings” button. Now both radios should be on the new NetID.

and i wanted to tell that when i connect my pixhawk to my laptop via usb cable then i am abe to control things like rudder and servo with flysky reciever but when i disconnect my usb wire to pixhawk from laptop then no repsone i can give from laptop via mavlink here is the connection of mavlink problem correct me if i am right please
allright iam going to follow this step then update you extremely thankfull for your response
Before doing anything with these radios you should setup, configure and calibrate both boats so they run properly. Looks like a bunch of parts right now…
1 Like
and command failed failed to execute loiter_unlim and command fail to execute MISSION START
IN SHORT WHY MY MOTOR AND SERVO NOT ARE NOT REACTING WHEN I AM GIVING A GUIDED FLY TO HERE OR AUTO OR MANUAL PLEASE HELP THANKYOU building an autonomous sea vessel.
Setup
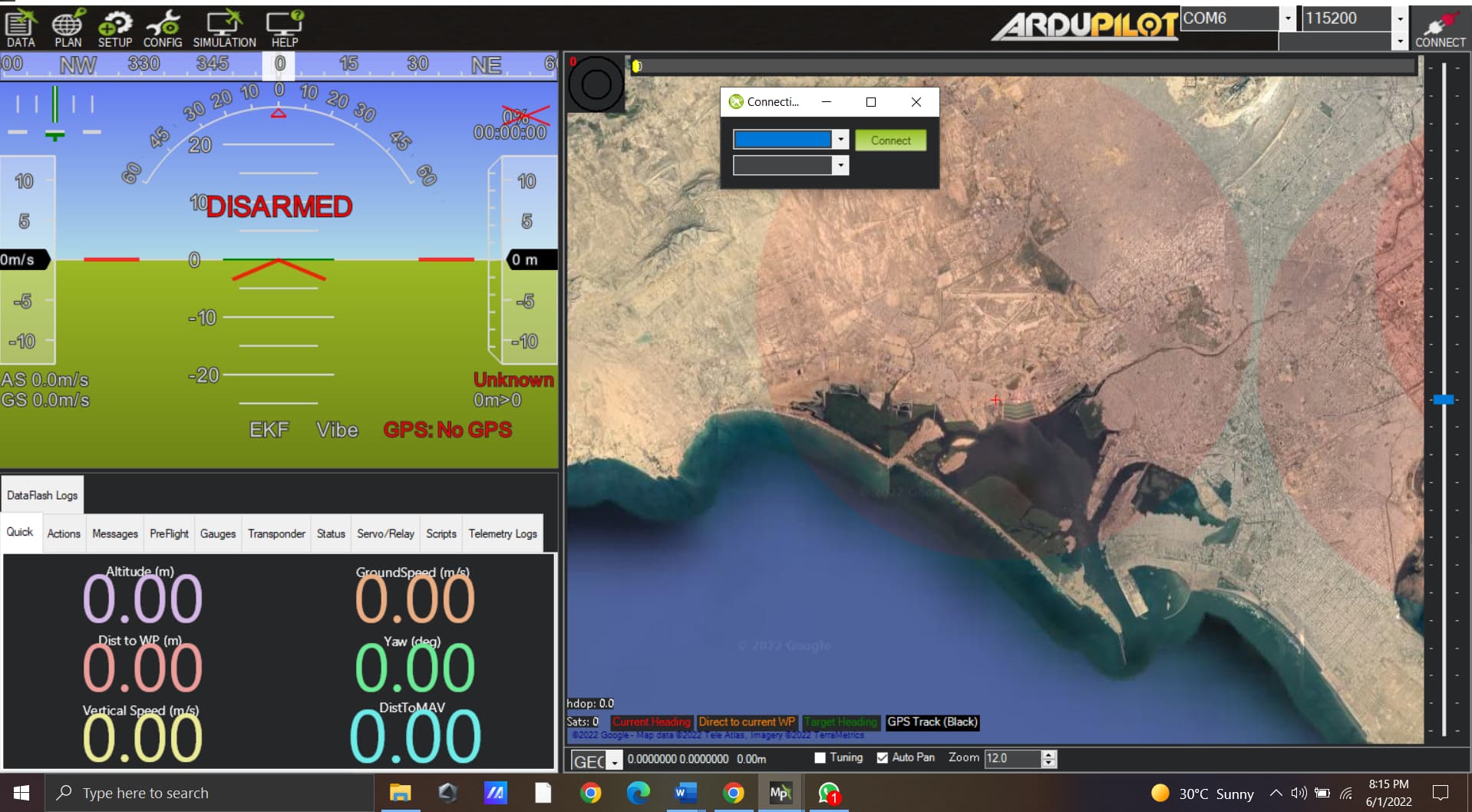
It appears that your Flight Controller is “DISARMED” (big red letters in the HUD)… Nothing will happen until your system says “Armed”. Good Luck!
i forced armed it still no response do i need pwm encorder ? i connected my esc ,my servo , and my reciever into pixhawk but one guy said i need a pwm converter to operate my servo
Maybe check that BRD_SAFETYENABLE = 0 (and reboot) to ensure the safety switch is disabled.
I think it would be good to post an onboard log if possible. This will remove some of the guess work required.
YEah macay everything working perfct thanks
1 Like