I’m long time rc hobbist but i have little to no knowlige about autopilots.
That being said, i need to find a way to integrate gps waypoint and compass autopilot to a real boat.
So, that eliminates the need for any remote control. Shure, i can use tx/rx but sistem must be cost efficient.
Is it possible to make sistem with something rather cheap like pixhawk where user can set gps waypoints, upload it simply to autopilot sistem (android or iOS platform must be used), push a button, set engine throttle and fish without worries ?
Steering would be done with some kind of high torqe engine, like windshield wipers engine, combined with hall effect sensor for rudder steer angle return information.
I know there is little chance i could find pwm controlled high power motor driver that i can plug directly into pixhawk so there is option that motor and driver is controlled with arduino taking commands from pixhawk.
Is something like this done before ? Any suggestions please?
Assuming your using a small-ish boat, I would use a trolling motor and linear actuator for this. It’s not fast, but its good for fishing and not sure I’d advise surrendering control of something fast to a pixhawk with non-guru-level-user. Anyway, with a trolling motor you can use a brushed DC motor controller as an ESC as well, so you have throttle control too.
I’m playing around with the idea of controlling the steering of a 44’ sailing yacht while operating under engine. I have a pretty good windvane to handle the sailing steering.
I’m in the early stages of getting things going, but that’s my plan, a 30,000lb manned drone.
I’m planning to test on a small boat with tiny outboard for propulsion, and use a 12V linear actuator (cheap through Princess Auto) switched through a relay board to move a tiller. I’m using what I have laying around for boats before I scale up to a hydraulic steering pump on the big boat.
I’m using an Electronic PWM Controlled Relay 12A (eBay) fed from the PXFmini to scale up the power demands for the steering devices that I plan on using.
I’m in the early stage of things, so the project really hasn’t gone beyond my bench yet.
Hi there !
Opening this bottle left to the sea
Pix. Yogi level mostly for very exotic copters and looking to upgrade my old Raytheon ST1000 to Pix for a 38ft thingy.
Rudder only will be controlled, not the throttle for obvious safety reasons, although it could perfectly be feasible.
That certainly can be done although with extreme caution, testing etc aka don’t do this at home or under your responsibility.
Hooking up the pix via usb to a mavlink capable GCS and forcing arm in rc override mode.
Using a hacked ardusub transducer it could even autoavoid shallow waters.
Not for the faint hearted though and regular sailing automatisms necessary to supervise the baby…
For smaller stuff two trolling motors with differential drive using ardurover would do the job, use skid steering , each output wired to the right motor and as easy as it can get with info found on the rover section of the forum.
Happy testing
Hey thanks, really nice setup ! sorry got extemely busy lately so no reply !
This is certainly the way i’ll go for a tender boat although small zodiac 240 and a series of rov/paddle thrusters to start with (followed by a beefier setup afterwards it goes without saying… )
For the actual mother ship it would be another story that would “only” control the rudder got an actuator fitted with the same setup as my original one and will modify a jumbo servo circuit able to control a good old mabuchi 550 ( the previous one worked for 10 years before brushes wear ) so that it accepts pwm from the AP.
you could build a very basic joystick PPM encoder to take your inputs and feed them directly to the flight controller without a radio, that way you can set modes and drive it using a joystick or even a wheel.
Thanks a lot Geo for the tip, that gives a more solid heading to go to !
I’ll start with only the boat tender related project , and share the results.
Fitting that on a real boat is just plain crazy for now , (even thought i’m convinced that it can be a navigation help, tested it with a small bench simulating the rudder with a servo during a real 36 hours navigation from Marseilles to Corsica with no glitch ).
Next step is to mount 4 thrusters ( cheapos at first ) rated 200 watt-ish each on a 2.60 zodiac and go heavy drivetrain testing/manoeuverability for the first trials at sea.
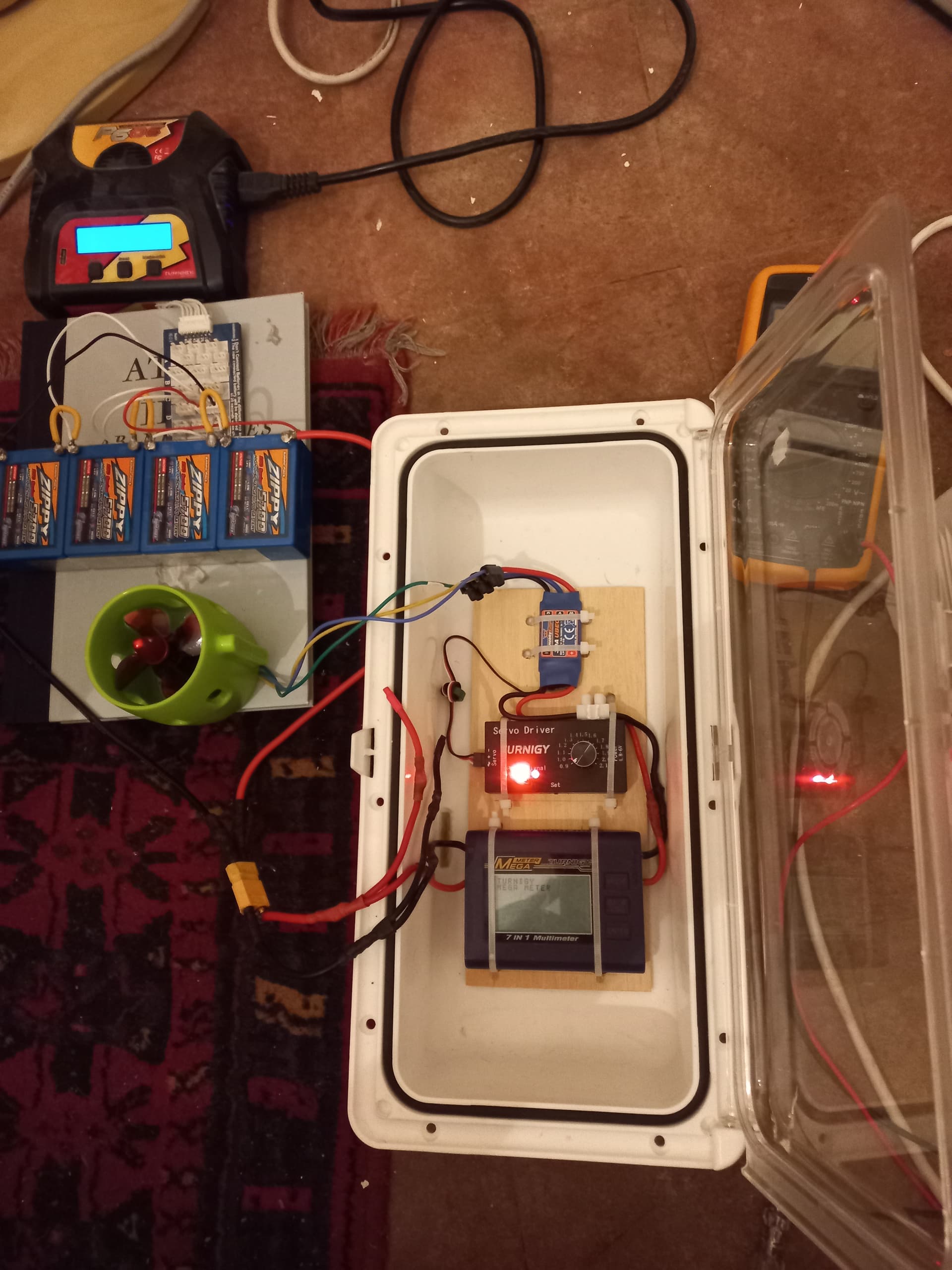
The first step of my setup is to make sure that " locomotion" part is ok.
Only controlling the 4 esc’s with a small servo driver and hooked up to a wattmeter for consumption check etc, before I hook up my x9d first for differential manual testing (and the fun of remote controlling a zodiac… ) and then full setup with the pix with rover firmware loaded for differential thrust gps following loiter etc all features tested very successfully on countless arduplane and copter setups before ( i’m a real noob at ardurover didn’t even manage to make diff thrust work on a land rover, not familiar with the rover hold mode and old bidirectionnal esc, need to do some more homework but certain that it works as proven by other community members)
I’ll certainly give a try to the joysticks you mention
Anyway, i’ll feedback the testing with pics and results, knowing that those thrusters certainly don’t par with a more serious marine electric outboard…
On the “smarts” part at some point some battery monitoring ( mauch etc… ) will need to be computed with gps data for a form of energy geofencing, making sure there is enough juice to come back to shore even thought wind etc will affect. Mostly as a safety feature, enable battery failsafe smart rtl when battery drops til 30% is certainly a first way to do that.
Lua can do a lot to help with the smart aspect of the boat, I have been working on some basic scripts for boats, first one was the bilge pump and notifications and the second was the shallow water avoidance.
You got me interested in doing a full sized interface for a boat so i bought this for £13 to tear apart and convert. It should be easy enough to get the buttons all working.
Hey great, and indeed if it has USB then joystick in via telemetry is the way to go !
I assume it will be remote then, a good RFD 900 or telemetry via crossfire shall give you range.
Still fiddling around with a bench for Thrusters from my side, I really focus on the “seaborne mechanicals” for now which are usually the weakest link due to corrosion and electrons not liking the presence of saltwater.
Those pictured have already been used by the community , on 4S they eat in 11 Amps for 176 Watts consumed at max throttle and push quite hard, I will measure thrust in Kilos this week ( some fellow makers said 3 kilos ) and then very provably head for distributed propulsion and saltwater testing on a small kayak of +/- 100 kilos first.
Bearings are only inox 314 and will not survive long and I doubt the seriousness of the waterproofing so only freshwater for now and provably an overhaul.
I will probably gut it and build something in to the wheel eventually but since its for an old xbox it can be modified to work with USB for some initial testing.


 !
!