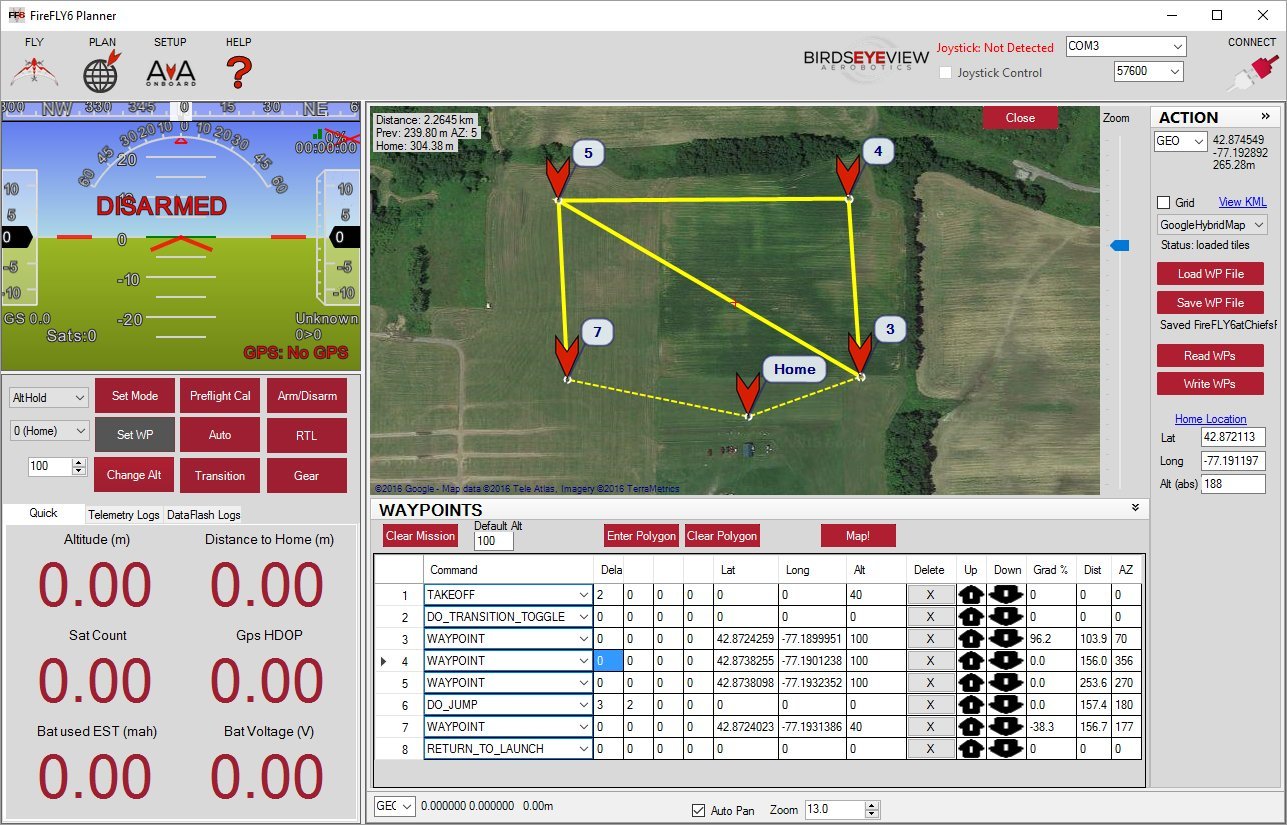
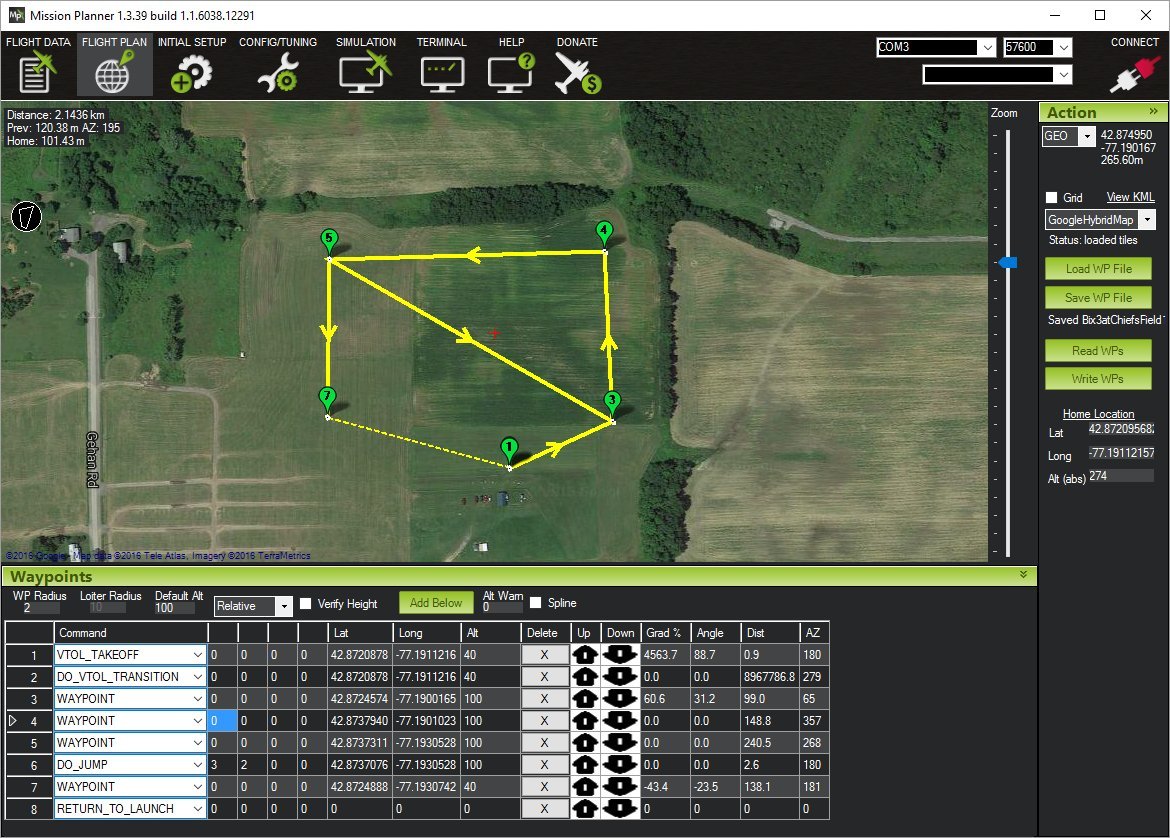
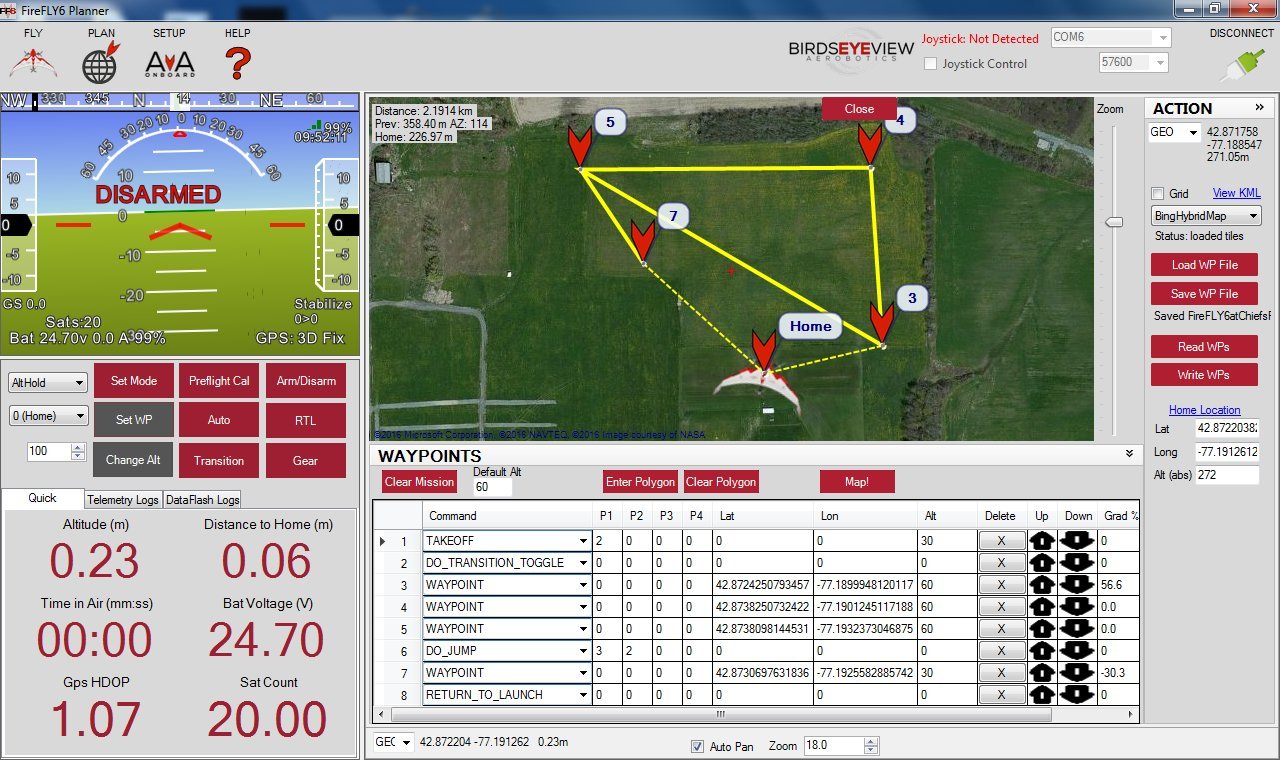
As a prelude to a mapping survey, I have created a simple autonomous mission for my Bix3 QuadPlane using Mission Planner v1.3.39. It is nearly identical to my autonomous mission for the FireFLY6 using the FireFLY6 Planner v1.1.
My goal is to test the QuadPlane autonomous flight plan capability and compare it to the FireFLY6 for mapping surveys using a Canon S100 camera.
Most of the flight plan numbers are in agreement except for the Gradient % of VTOL_TAKEOFF and the distance on the DO_VTOL_TRANSITION.
Does anyone have experience with a QuadPlane autonomous flight plan?
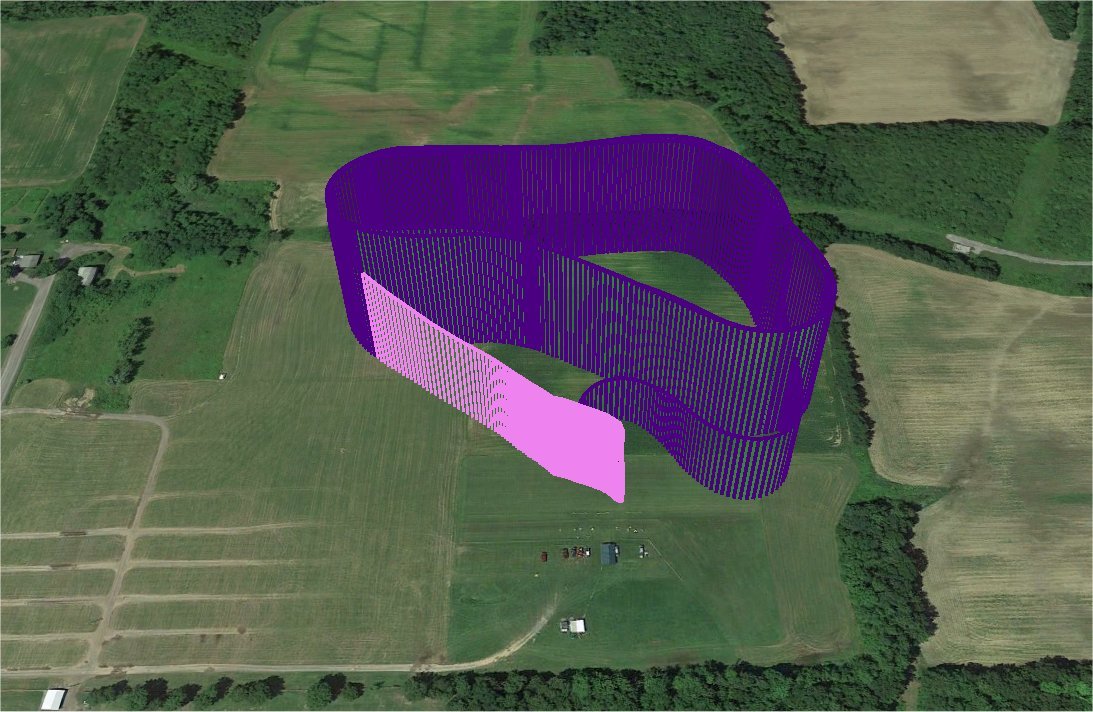
I didn’t bring my Bix3 QuadPlane today but I flew my FireFLY6 for a couple flights using the mission plan above.
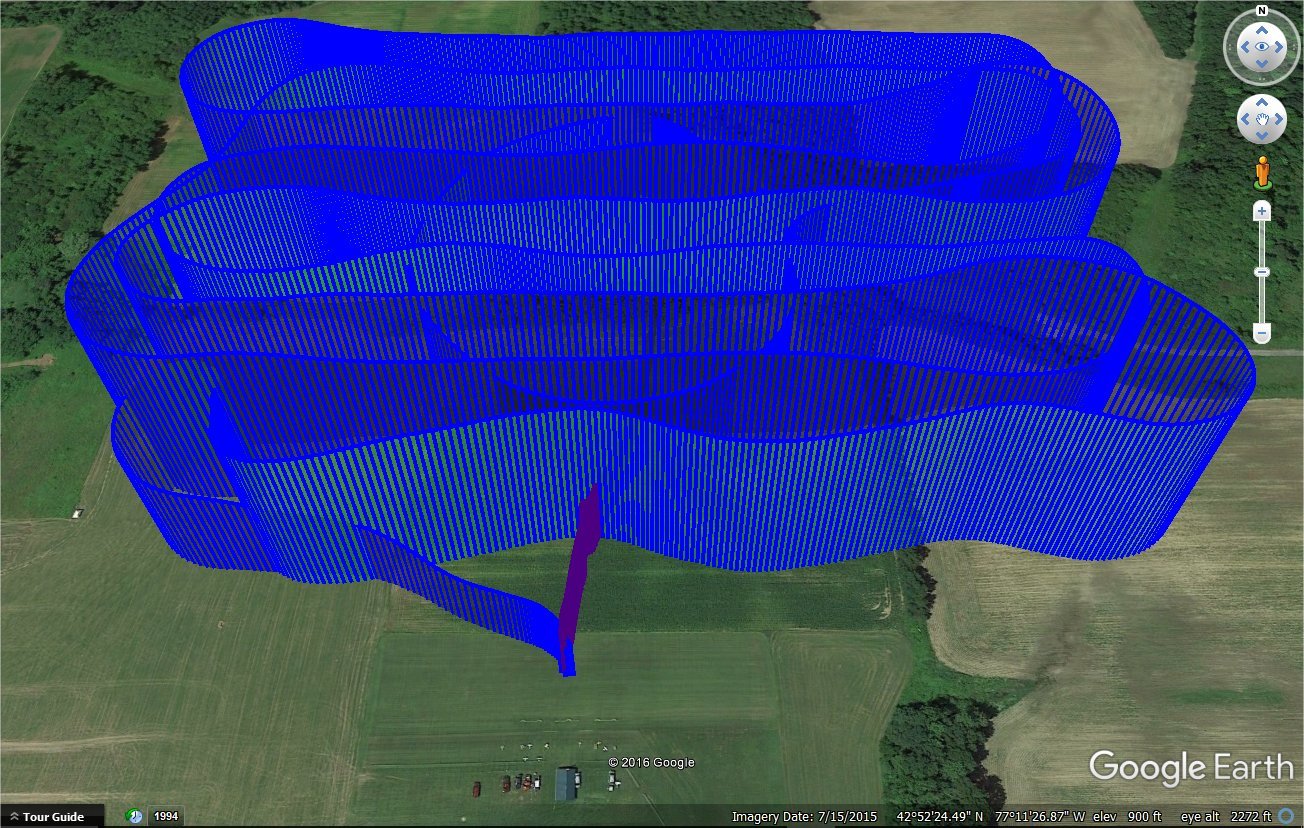
The first image is from Flight 1 where the Purple section is the main flight going up to 100 meters. The pink area is the RTL where it transitions back to hover mode and lands.
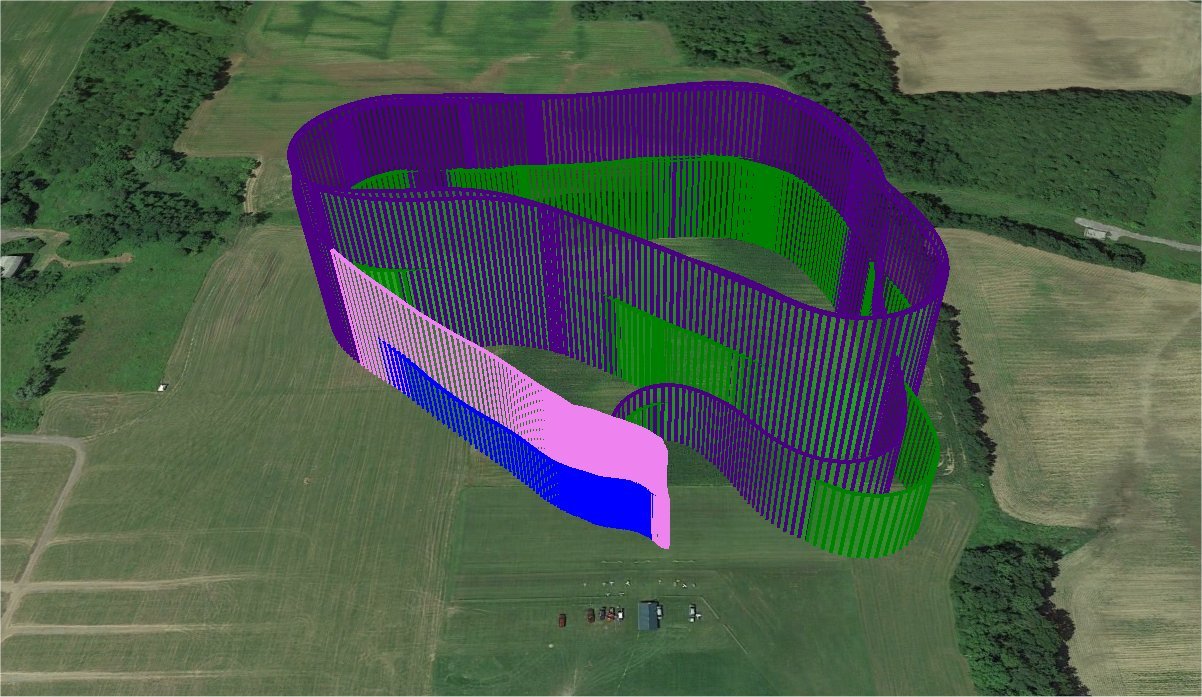
The second image is both Flight 1 and Flight 2 where I lowered the altitude from 100 meters to 60 meters (in green) and the RTL (in blue) at 30 meters.
The FireFLY6 automatically controls the landing gear on each transition and performs what is called a Hybrid RTL in QuadPlane terminology. It will be interesting to see what the Bix3 does using a similar mission plan.
@GregCovey - really nice to see people who made the QuadPlane code work. Since your post covers an AUTO mission, I’m curious: have you tried to fly an autonomous mission with a waypoint in VTOL/quad mode only? I’m stuck trying to figure out why my plane won’t start navigating to a waypoint. Thanks!
I haven’t tried any autonomous mission yet with my QuadPlane but it’s still in my queue to do. In my Bix3 QuadPlane thread in this forum, I still have a simple test to do with QRTL and setting some parameters different (see below). Although this test can be done down the street in a soccer field, I want to test my first QP auto mission at a much more open field as shown above. Now that the crazy summer heat is gone, I hope to test it soon.
Bix3 Parameter Changes
LAND_THR_SLEW = 120 (was 0 which means use THR_SLEWRATE)
Q_LAND_FINAL_ALT = 3 (was 6 meters)
Q_LAND_SPEED = 50 (same as before)
THR_SLEWRATE = 100 (same as before)
I tested the Bix3 with an autonomous mission yesterday and it was flawless except for the previously reported issues in Hybrid RTL. The mission used was the same one I created for my FireFLY6 with only the VTOL commands changing text. I have video on both flights so I will post them soon. It was fun to see the Bix3 QuadPlane perform an autonomous mission with takeoff, transitions, waypoints, do loops, and RTL safely back to the landing pad.
This flight of the FireFLY6 VTOL was fully autonomous from take-off to landing. A simple 8 command plan was used to take-off, transition to forward flight, activate the retracts and fly around three waypoints before returning home.
The same mission plan was then used in my Bix3 QuadPlane with the only changes being to the VTOL command text for standard APM Plane code. I’ll post a video of the Bix3 autonomous flight soon.
My first autonomous mission with the Bix3 QuadPlane was very successful. I used the same simple 8 command mission that I originally used on my FireFLY6 VTOL. Only the first two commands have text wording changes. The same two issues (as previously reported) were seen during the Hybrid RTL process. The LAND_THR_SLEW value change didn’t seem to affect the “porpoise” issue but the Q_LAND_FINAL_ALT setting change from 6 meters to 3 meters directly affected when the drifting started on final descent.
I’m setting up for my next QuadPlane mission, and, based upon Anthony’s suggestions, I have replaced the RETURN_TO_LAUNCH command from my initial mission with a DO_VTOL_TRANSITION 3 and VTOL_LAND. Some other minor changes are moving Waypoint 7 closer to Home (or Waypoints 1 and 9) and lowering the altitude from 60 meters to 50 meters as the nearby trees are only about 25-30 meters high.
Note that VTOL_TAKEOFF and VTOL_LAND have the same Lat and Long values.
Additionally, I have enabled the Weather Vane feature (Q_WVANE_GAIN = 0.1) and changed LAND_THR_SLEW from 120 to 50. I don’t expect the LAND_THR_SLEW change to have any effect due to eliminating the RTL command.
Hopefully, I’ll get to test and video these changes this weekend…
In my second autonomous flight with the Bix3 QuadPlane, using APM Plane 3.6.0, I replaced the RTL or Hybrid RTL commands with a DO_VTOL_TRANSITION 3 and VTOL_LAND. This eliminated the two issues I previously had when landing.
I also enabled the Weathervaning feature with the default value of Q_WVANE_GAIN = 0.1. This feature also appeared to work great!
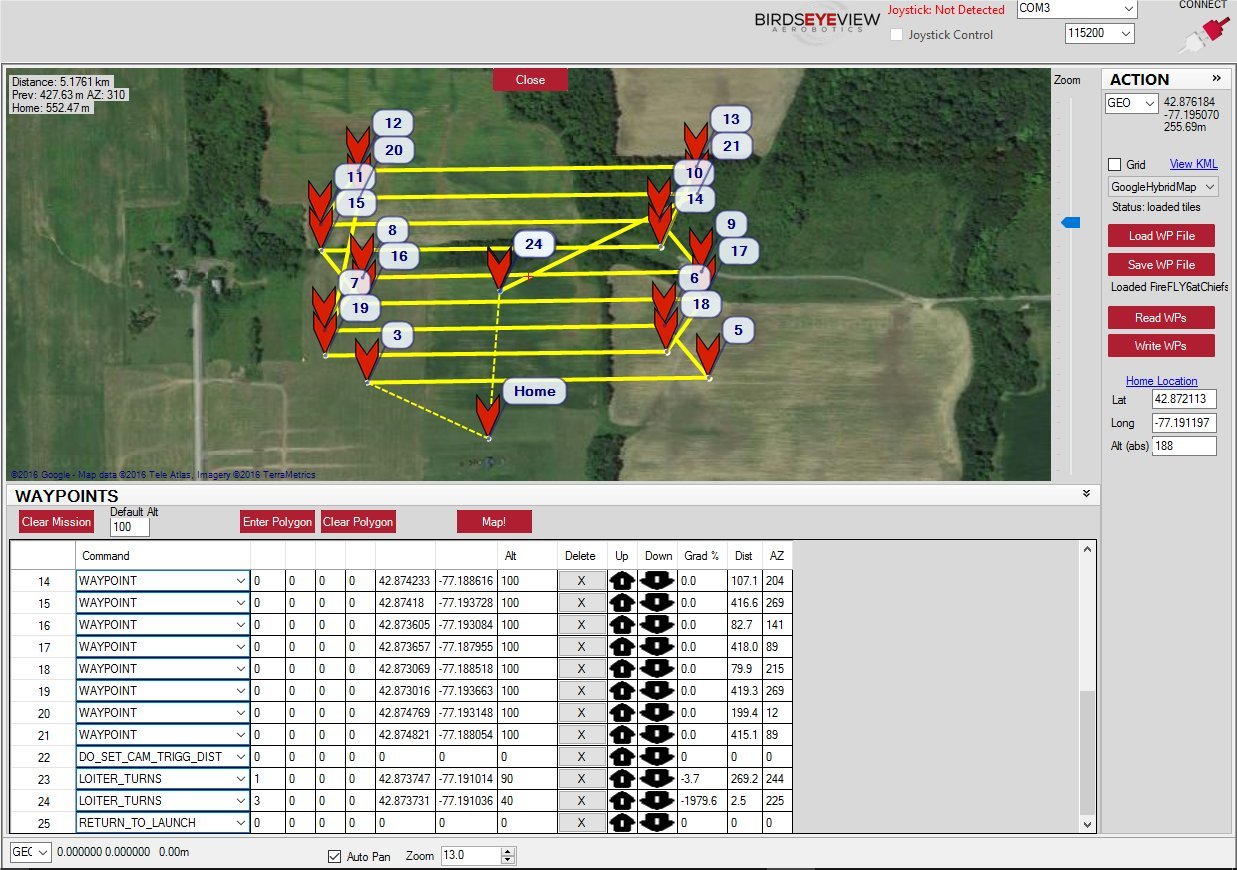
In my second FireFLY6 mapping survey, I changed the landing technique to use Loiter Turns to descend before transitioning back to Forward Flight mode. We used the Hoodman Landing Pad so show how accurate the take-off spot is to the landing spot. The swirling winds gave the Smart Wind Assist feature (called Weather Vane in a QuadPlane) a good test as well. Overall, the FireFLY6 flew perfectly…all by itself!
The kmz file from the FireFLY6 survey flight log reveals the altitude drop from using the loiter circles. You can see the starting height of the larger blue circles in the center of the survey and the ending height where the purple path changes to hover mode during the RTL.
I added my latest FireFLY6 Mapping Survey test to my Exmaps account. I now have current readings which reveals just how much less current is used in Forward Flight mode. The current is about 19amps in FF mode and more than double in Hover mode. It will be fun to try my QuadPlane on the same mission.
Here are the two (resized to small) images from mapping surveys done with the FireFLY6. The first one was mid-September and the second one was mid-October. It will be fun to repeat this autonomous mission with my Ranger EX QuadPlane when it is finished.
You can change the view perspective in Microsoft ICE which is why my second photo is slightly different. The second to highest resolution that I used for exporting produces a 50meg image so you can zoom in quite nicely.
I’m sure that Pix4D would be fun to use but it costs money so MS ICE is a better choice for the hobbyist.
Nice stuff Greg, following closely. I have not yet tried auto take off and landing with my Ranger Quadplane, so this is really useful to me.
What surprises me is that the Firefly6 does not seem to be very efficient. According to the specs, it’s running 6S and you say it draws 19A in forward flight. That’s around 420W. My Ranger VTOL only requires around half that. (4S and ±14A). Maybe yours is not 6S - can you confirm?
Yes, that is a good observation. My FireFLY6 is running at 6s and my typical forward flight power with payload measures 415 watts. There has been some testing that may prove my RC Timer t-style carbon props to be inefficient when compared to Aeronaut CAM Carbon Light Props used on the FireFLY6 Pro. They seem to draw around 303 watts in forward flight but these measurements were done on a different system. I would have to try it myself for a better comparison.
I have not addressed my FireFLY6 efficiency issue yet since I am flying surveys well under my battery capacity but it would not surprise me to find the Ranger EX more efficient in flight. It was designed for long FPV flights and the new QuadPlane firmware makes it a great choice!