Hello,
i am trying to create simple mission. Copter should make:
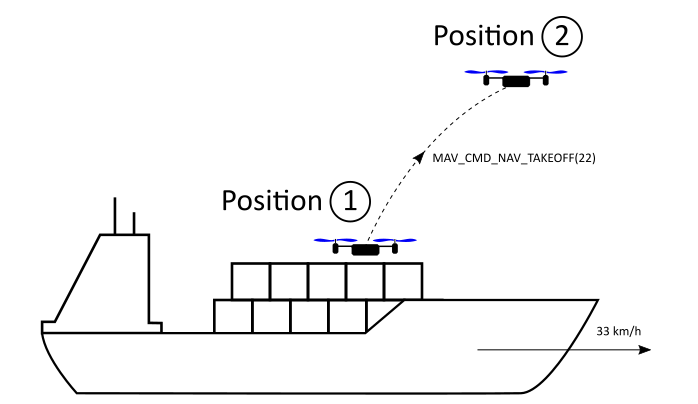
- not vertical, tilted start
- simple flight
- not vertical, tilted landing.
Everything should work as in the image
I would like to ask, if this not vertical takeoff is even possible?
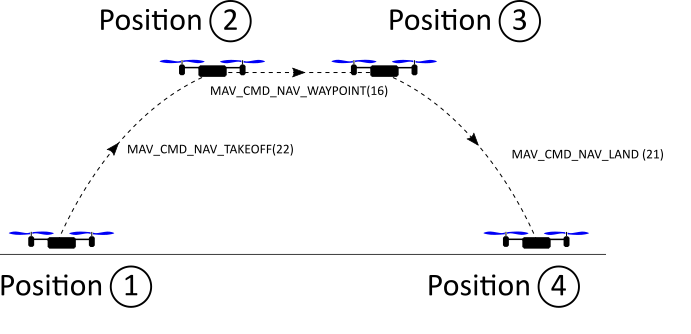
Futhermore i would ask about Mission Item Order?
Should I send
MAV_CMD_NAV_TAKEOFF(22)
MAV_CMD_NAV_WAYPOINT(16)
MAV_CMD_NAV_LAND (21)
Or maybe i need some special zero waypoint at beginig?
// edit
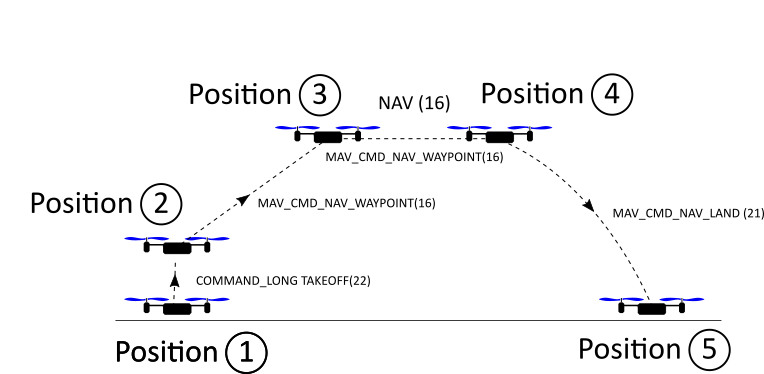
When i made this by clicking i have got following wp list (from mavproxy)
16 0 53.1174926758 23.1462574005 0.000000 p1=0.0 p2=0.0 p3=0.0 p4=0.0 cur=0 auto=1
22 3 53.1175651550 23.1464157104 50.000000 p1=15.0 p2=0.0 p3=0.0 p4=0.0 cur=0 auto=1
16 3 53.1178207397 23.1465492249 50.000000 p1=0.0 p2=0.0 p3=0.0 p4=0.0 cur=0 auto=1
21 3 53.1177139282 23.1461715698 0.000000 p1=25.0 p2=0.0 p3=0.0 p4=1.0 cur=0 auto=1
It looks like first element should be always MAV_CMD_NAV_WAYPOINT(16). Futhermore in that case takeoff is not first.
When i try to start it force change to guided mode, next it sends vertical takeoff comand and eventually when copter is in air change mode to auto.
I would ask if there is any way to start mission i automode from ground?