Hi,
I am currently trying to do autonomous Precision landing in a custom-built quadcopter using fiducial markers(ArUco tag). I have a companion computer which runs ROS and sends Landing_Target Mavlink message.
The Mavlink messages mainly have the x_offset and y_offset in radians and distance in meters.
Question:
-
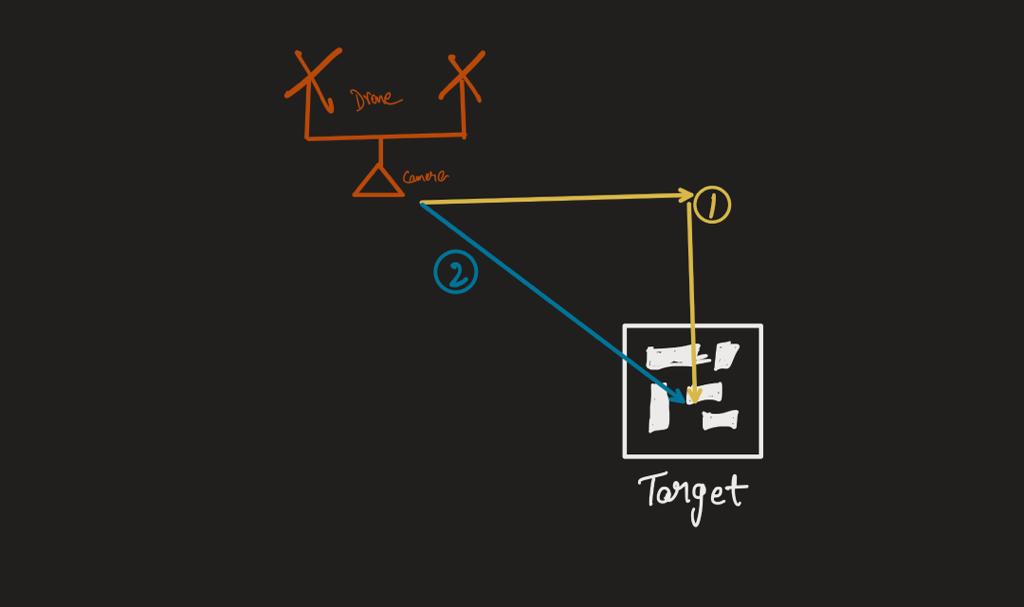
Does the precision landing mode correct its x and y offset first, centers itself before descending (1) or does it reduce x,y,z together taking the shortest path from drone to target (2). Can i know which motion does it do.
-
Currently we are only able to change the speed at which the drone descends during landing.Is there any place for us to change the velocity at which the x and y offsets are corrected during precision landing. Can i get linked to the place where this value is being set in github code base.
-
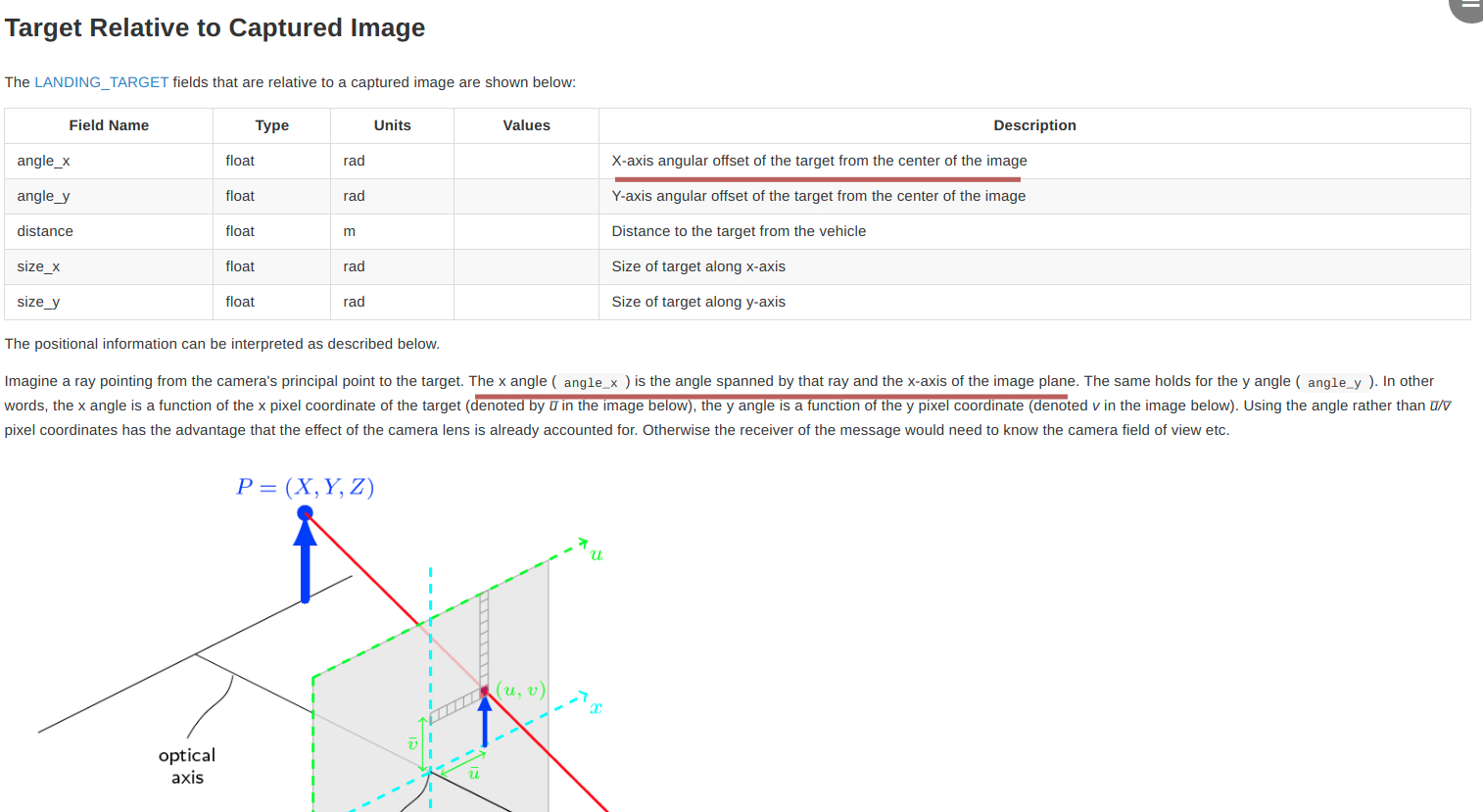
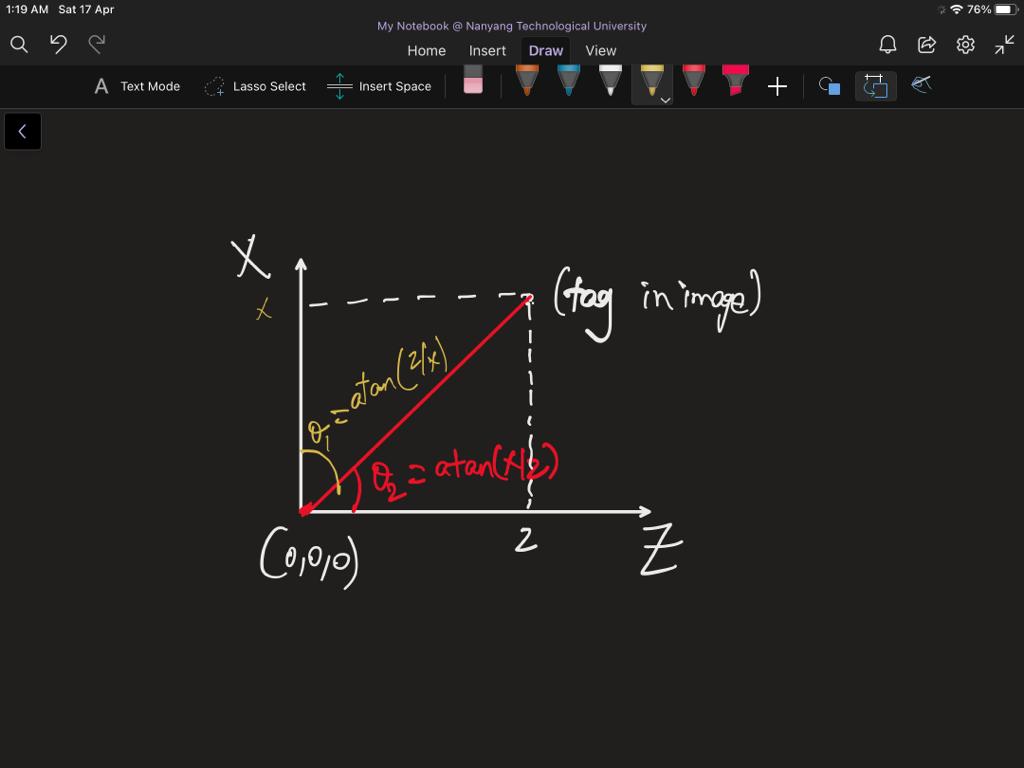
This is regarding the MAVLINK MESSAGE [“LANDING_TARGET”] , the angle_x is the angular offset of the target from the center of the image which means its theta1 = atan(x/z) where x and z are the distance in m and denote how far away they are in x axis and z axis.(https://mavlink.io/en/services/landing_target.html)
But the explanation below the table say its the angle spanned by the ray and the x-axis of the image plane which mathematically is theta1= atan(z/x) where the variables are the same as above.
As they both are denoting two different angles as shown in the attached image.
It would be really helpful to have some clarity on this.
Thank you in advance for the help!