Hi everyone! I’m new to the forum and though this is my first post, I’m reading a lot on here for quite some time now hoping to learn something related to my project. Due to my very little knowledge with RC stuffs, i got confused and decided to formally ask for help from the members of the forum.
To provide you a back grounder, I work on a Law Enforcement capacity here in my beautiful country, the Philippines. presently my team is stationed along the coastal area of southern Philippines where sea piracy and extortion of all kinds are rampant. we only have limited personnel and water assets to cope with the demand of security that is why we decided to venture on a DIY autonomous boat for surveillance and visual patrolling. this project started sometimes in January 2017. It’s an 8 feet long Trimaran design powered by a 4Hp gasoline motor.
Now, that the motor and hull was tested, I’m on the process of integrating electronics on the project. Unfortunately, I have very little knowledge on it and I educate myself thru internet research only.
what I want for this boat is to be able to autonomously follow waypoints using a mission planner. i know for a fact that only limited amount of control for the throttle can be applied since the motor is gas powered but that is fine. I’ll just calibrate the lever and set it manually before i will test it. as for the rudder, that can be controlled autonomously by APM. I already have servos, batteries and UBEC for this one and the servos are already binded with the TX(Taranis x9d)
I ordered 433mhz module abroad and still on it’s way. that will be used to extend the signal of the rx/tx.
My problem is, I have no idea on what APM to be used and other equipment to allow the boat to follow waypoints during operation and my big question in mind is, Is this doable?
I’m humbly soliciting advice from the members of this forum for any inputs that may be contribute for the success of this project.
thanks in advance and more power.
thanks john, i haven’t decided on what to use to make it autonomous. i’m confused if i’ll be using pixhawk or arduino. i saw your video and i was amazed!
When you say Arduino I assume you mean an older 8bit APM? Note we don’t really maintain that code anymore and it hasn’t had any new features added for some time. I would recommend a Pixhawk Cube if you still haven’t decided.
thanks for the feedback, grant. yes i haven’t decided yet since the availability of such electronics are purchased abroad so i’m still doing some research on the best but affordable APM. will consider your suggestion. thanks again!
then whilst it is the same specification as the standard Pixhawk 1 I can’t speak to its manufacturing or component quality.
For a large expensive vehicle such as yours I would buy the highest quality parts I could as saving a couple of hundred dollars isn’t worth the potential loss of the vehicle or delays to the project.
pardon me for this dumb question but if i purchase the pixhawk 2.1, what other attachments do i still need? i already have here the Rx module (433mhz), servos, ubec and lipo (5200mah, 4s). do i need a compass and gps? i believe that it was already integrated inside the cube. my goal is to make this boat navigate through waypoints. please guide me. thanks!
Yes, you need to get a compass and gps also. I’d suggest you to go for a pixhawk 2.1 plus here gps combo.
Concerning the throttle, depending on how it’s handled on your engine, you might also be able to use the pixhawk to control it (and i suggest you do, way better in terms of safety)
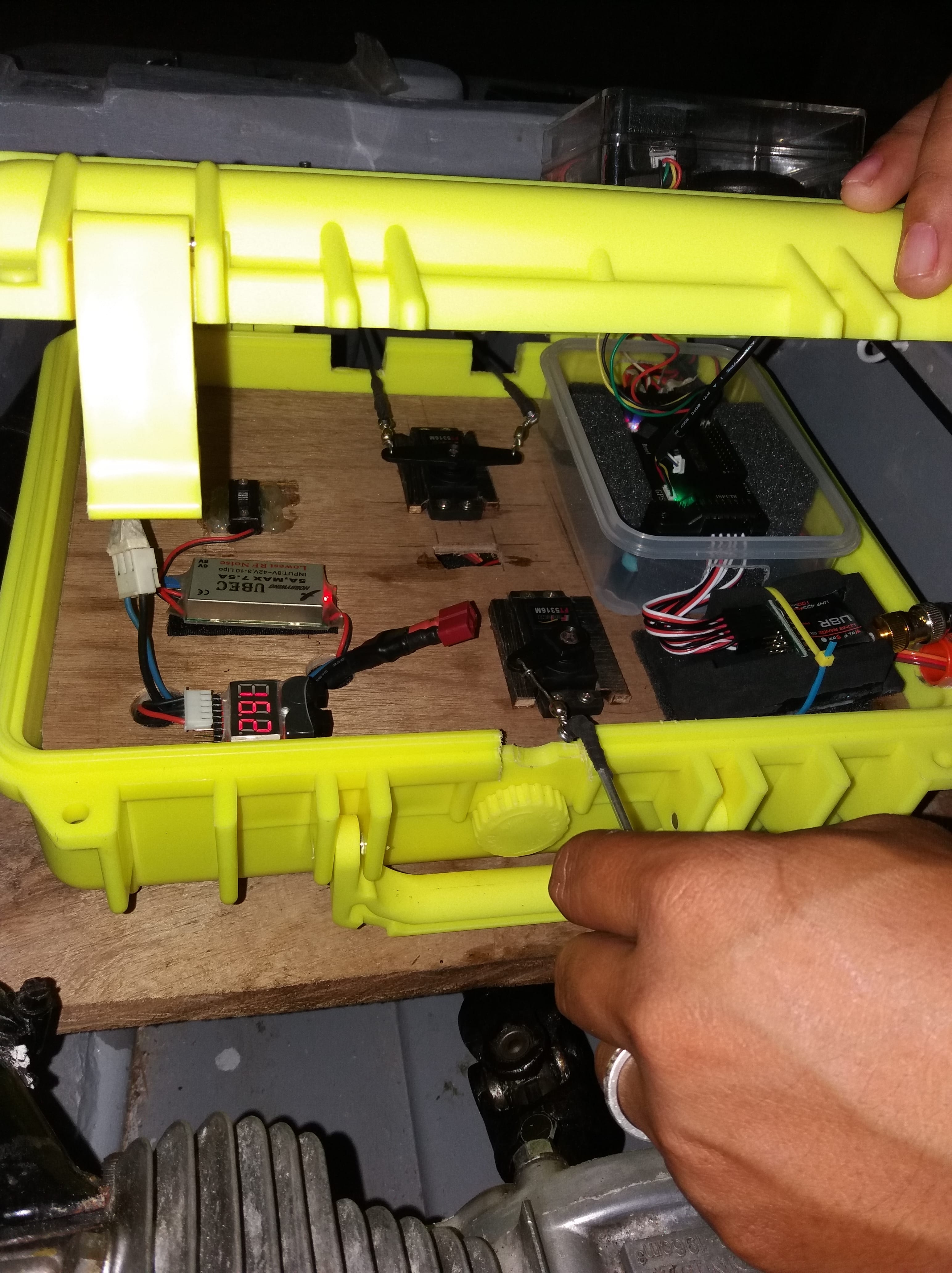
i was able to purchase APM 2.8 and decided to use it for the trimaran project. i used the ardurover firmware and made the mandatory calibration.
rigged it in a pelican-like hard case and installed it in the boat. the servo outside the box serves as the emergency kill switch for the boat incase it gets “haywire”
due to my very limited knowledge, i relied on google to find an appropriate parameters suited for my project but with no luck. may i ask for suggestions on possible parameters to use? i want the boat to follow pre-made waypoints in auto mode but for the rudder only. i will manually control the throttle or if it is not possible, i’ll just set it to it’s minimum (0%) because at 0% throttle, the manual motor still spins the propeller. during testing i just used 30% of motor throttle as its maximum.