Hi ArduPlane community and happy easter!
Some recent flights with our Nimbus VTOL (from MyFlyDream) have caused some head scratching for us.
The aircraft is configured like this:
-Nimbus 1800 plane w/ VTOL conversion
-12Ah 6S battery
-Taranis X8R / X9D+ combo
-no airspeed sensor, GPS only
-no payload in these flights
-GPS fix arming check is enabled
We bought two of these aircraft for long range (BVLOS) inspection missions in Germany. After receiving them, we have done lots of flights getting used to it and tuning it, working up to automatic flight modes (Loiter / RTL / AUTO).
We have uploaded a test AUTO mission (auto takeoff at Location A, transition, waypoint flight, transition, auto land) and had no problems.
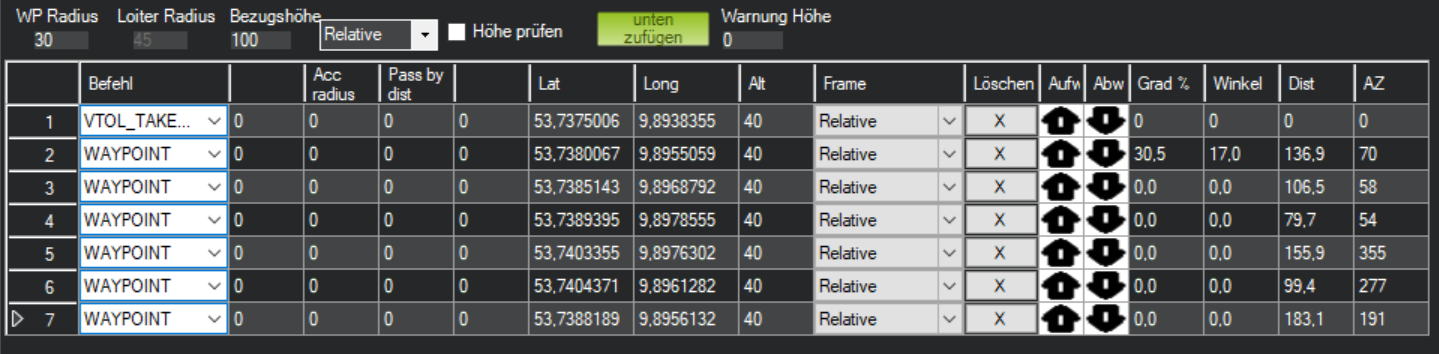
The next time we uploaded a similar mission nearby, but in a more accessible takeoff location. (VTOL_Takeoff to 40m, waypoints, then land). The mission is unchanged in the following 4 flights and we had great conditions with close to 0 wind for all four flights.
1st flight (Takeoff Location B): Aircraft takes off, immediately rolls hard right (towards 1st waypoint) and seems to disregard the VTOL takeoff to 40m. Almost crashed into a bush before I took over (QLOITER / QSTABILIZE) and landed. We blamed it on bad GPS signal and chose to go back to the previously working takeoff location where we have more space in all directions.
Log: https://drive.google.com/file/d/1SCHDuqP6n18aqG5xBaw1xw9s2XJV2puO/view?usp=sharing

2nd flight (Takeoff Location A): Mission works with no problems, other than a bit of toilet bowling in the beginning.
Log: https://drive.google.com/open?id=11JGOn3-nJX4VFvQiJVvxcQG_IN9n5X7N
3rd flight (Takeoff Location A): Mission works with no problems.
Log: https://drive.google.com/open?id=1A2R8LHffwwbM7ZhuaqIgfOLyIQ1q-oGa
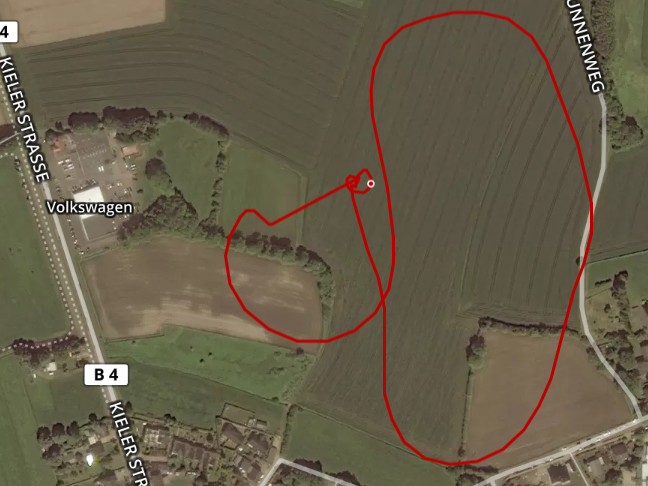
4th flight (Takeoff Location B): Went back to the first location and chose to do a QLoiter first to verify GPS, then land, disarm and start the Auto Mission without power cycling. Did just that, the aircraft did the same thing as in the first flight. This time, I couldn’t get it back under control and it crashed into a bush. Could not disarm, props kept spinning even at 0 throttle. It then became airborne again, crashed into a second bush where I could disarm it. Fortunately, only 2 props broke and the aircraft seems fine.
Log: https://drive.google.com/open?id=1fFfP2pGKGEmzMHk5L1Czu66v0YvYE099

Now my questions:
-
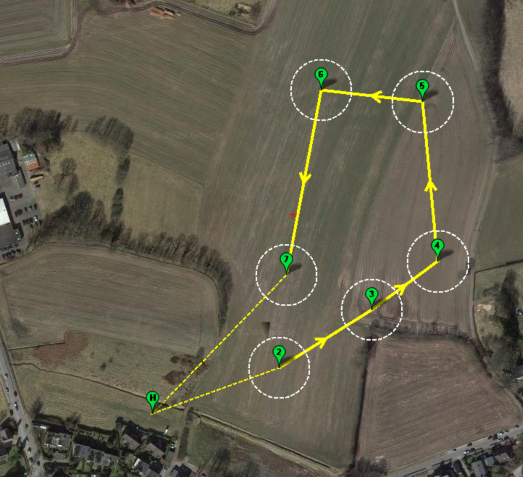
Is this behaviour caused by the aircraft being too close to the first waypoint on takeoff? The only difference between the 4 flights seems to be the takeoff location. If not, what could be the reason for this? (Distance from Takeoff-Point to first waypoint is more than 100 meters, so much more than WP_Radius)
-
The aircraft was delivered basically flyable with V3.8.2-dev. We chose not to change it in order not to mess up any settings. Are there known problems in that code that could cause this?
Thank you very much for your time and effort!
Best wishes from Hamburg and stay healthy
Oliver