I am having trouble with automatic mode switching to FBWA after landing. Everything else is working fine but after an AUTO flight (AUTO, RTL, QLAND) after landing, mode automatically changes to FBWA.
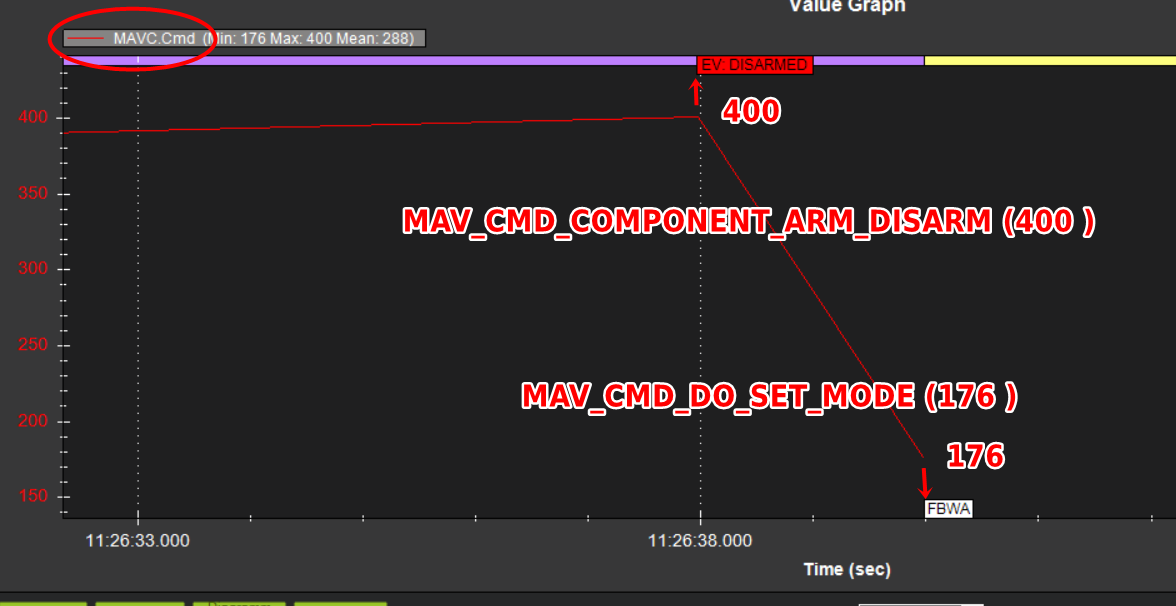
In logs it was showing the reason for changing mode is GCS command, so i change the GCS but still getting same issue.
Could anyone help me out in this? @tridge Please help me out in this.
Your transmitter’s mode switch (ch8) is set to FBWA.
After Disarm the flight mode may be following the transmitter value. Try setting your transmitter’s mode switch to manual mode.
MavLink mode change commands don’t just materialize from thin air. You said you changed the GCS. What does that mean? Are you still using an identically configured version of QGC on a different computer? Do you get the same results if you use Mission Planner?
@Yuri_Rage
By changing GCS i meant using a new laptop(mission planner).
I didnot try with QGC. But with new mission planner the response was same. It was still shifting to FBWA
Please describe your system in better detail. Your extremely short replies aren’t helping solve the problem. Exactly what hardware is connected? Exactly what software is in use?
@Yuri_Rage
Extremely sorry.
I am using arduplane firmware v4.3.3 with mission planner.
About hardwares:
Raspberry pi 4
RFD 900
CUAV airspeed sensor
Orange cube+ (with buzzer and hardware safety switch)
HERE 3+
About raspberry pi:
I am using it for cellular connection. Pi is acting like a courier, it takes the data from the cube to deliver it to the mission planner and vice-versa.