To start a large helicopter, it is necessary to start the engine at zero total pitch. When the engine reaches a certain speed, it slowly increases the total pitch and begins flying. At this point, H-RSC-MODE=4. How can its automatic throttle be segmented for activation. In addition, the throttle curves of large helicopters are not consistent in both unloaded and fully loaded situations. So, when the RPM sensor fails, how can we solve the throttle curves in both situations?
Please guide all experts in setting up, thank you.
Also, my plane is very large, with a rotor diameter of 6 meters.
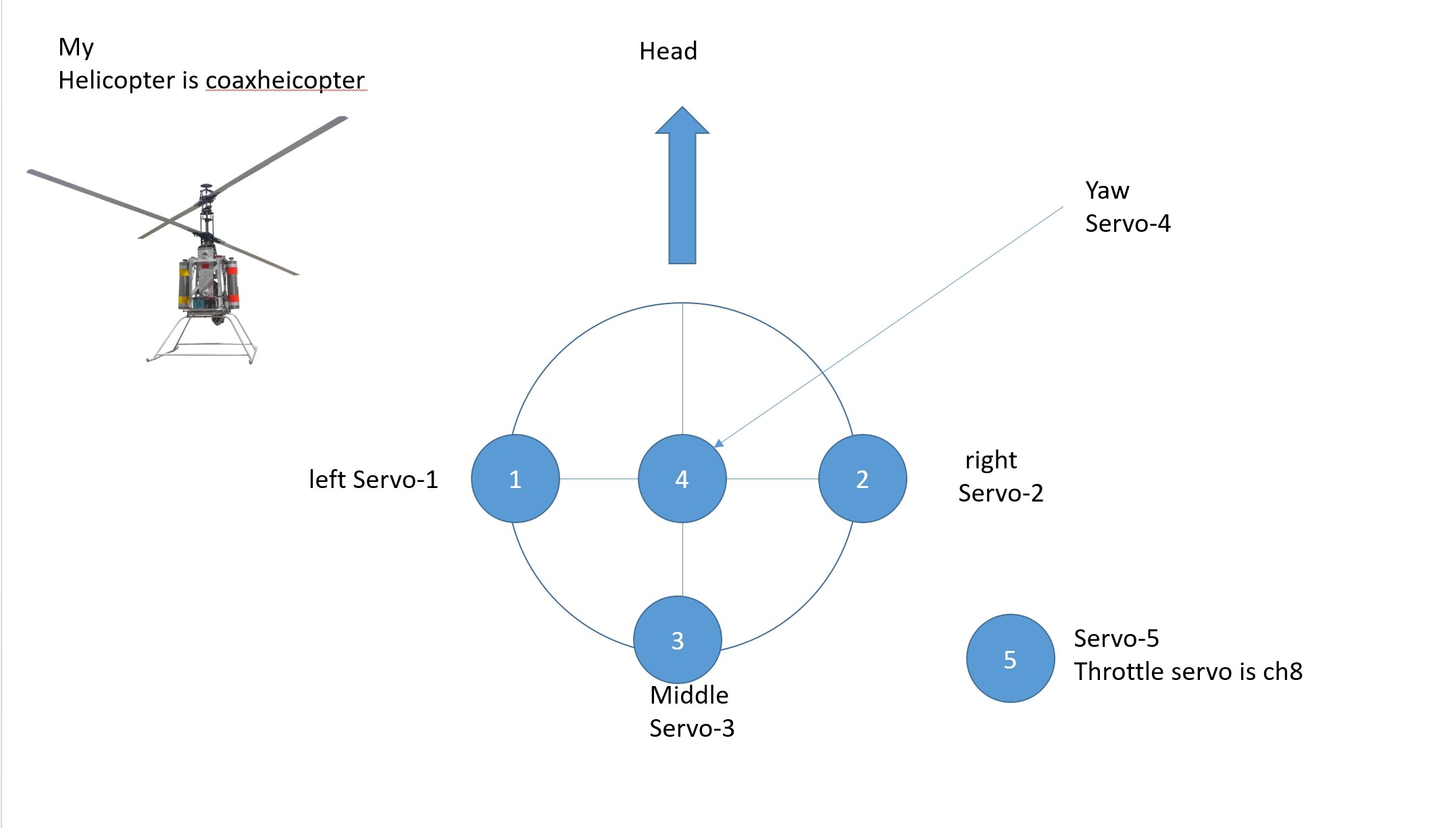
@acef3c you need to provide more information on how the helicopter is set up. Provide me a log or param file and a description of what each output of the flight controller is connected (ie ardupilot servo 1 connected to left-forward swashplate servo, ardupilot servo 4 connected to tailrotor, ardupilot servo 3 connected to engine throttle, etc). Also there should not be any RC transmitter mixing.
Once I have this information, I can give you an answer.
@acef3c I am assuming by the diagram you have provided that this is a ganged swashplate (i.e. One swashplate at the bottom controls both rotors with the yaw servo applying differential collective.
In this case, you would not use a dual heli frame type. This would use the trad heli frame type (6) with the generic swashplate and assign the proper angles to the servos. servo 1 would be -90, servo2 would be 90 and servo 3 would be 180. Servo 4 would be assigned the tailrotor.
This is my first attempt at automatic throttle, and I have already hovered over the flight with the H-RSC-MODE=3. Please download and take a look on the day of the first test. I want to do a ground automatic throttle test first, with a target speed of 1900, but it failed. How should I set it up? Please guide me. thanks
Hi @acef3c for RPM automatic speed governing you need to use RPM1 input, not RPM2 like in your setup.
The specific part of the code looks for the first rpm instance.
@acef3c
I agree with @Ferrosan. You must have RPM being measured on RPM1.
Also I looked at your data from the first log file and there is a lot of noise in the control signals. It looks like you used the harmonic notch filter but used the dynamic FFT as the source for the notch center frequency. Why do that when you are measuring the speed directly? Set the harmonic notch to dynamically adjust based on the RPM sensor. Also if you do choose to use the dynamic FFT, it was not set up correctly. I would recommend just using the RPM sensor data.
I did not see the log where you flew with RSC Mode 3. The other log shows a flight with RSC mode 1. I would like to see the log where you flew in RSC Mode 3
Hello, you have uploaded the latest flight log. Please download and check. My control speed is 2550 rpm. Due to installation location limitations, this speed is not the rotor blade speed of the helicopter, but the engine drive shaft speed. 1/5 of its actual blade speed
Additionally, I attempted to put the aircraft into poshold mode, where it would either crash or suddenly rise. Please see how I can set up the aircraft to fly in POS mode effectively.
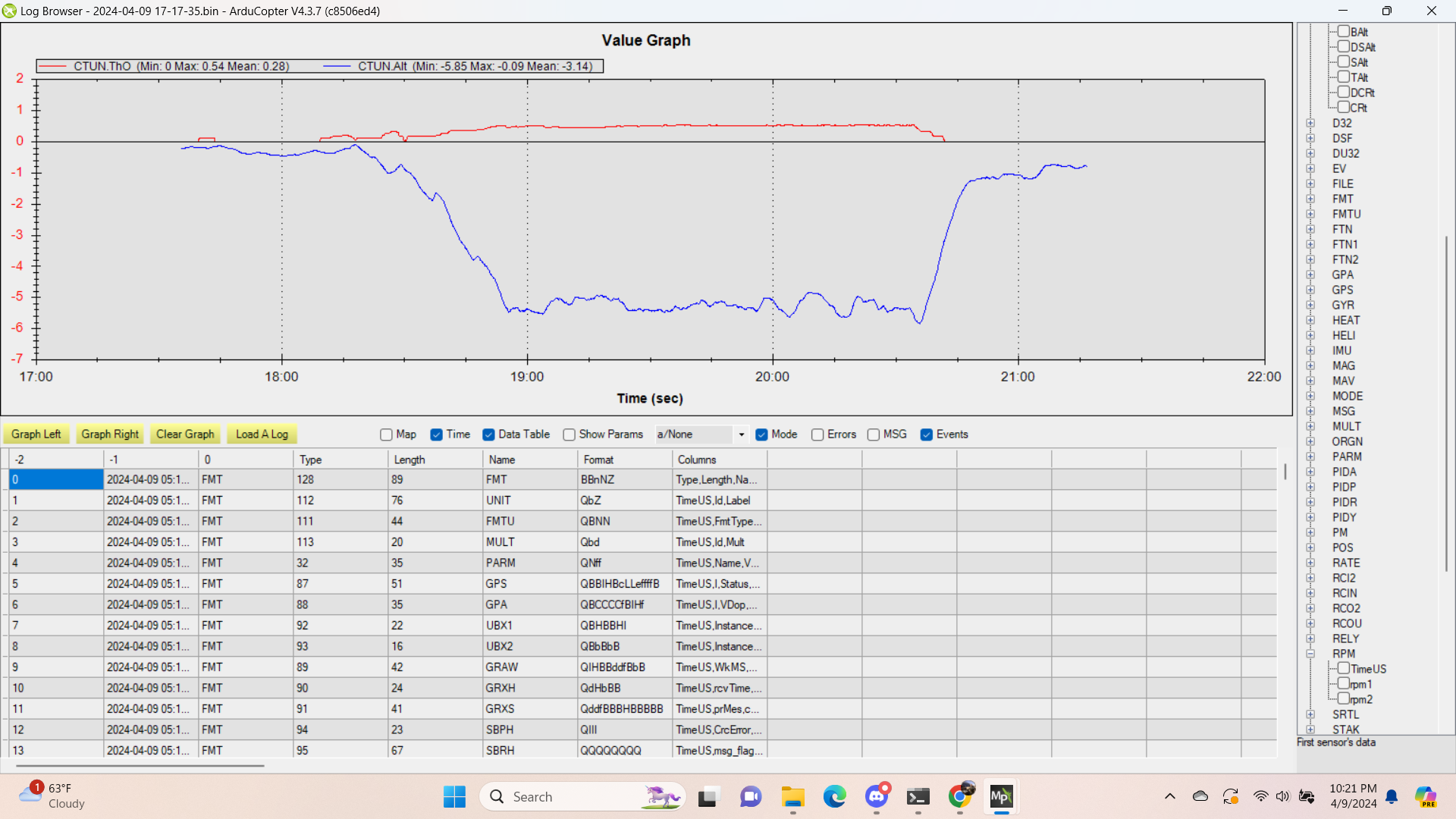
Please take a look. I set the automatic throttle to RPM 1. My preliminary analysis shows that the problem is caused by the combination of the barometer, engine, rotor, and fuselage vibrations
It shows negative altitude. I think you have a set up problem but I haven’t seen this before. Do NOT use ALTHOLD or LOITER until you fix this. You could crash your heli.