When using a rangefinder the documentation says you can set LAND_FLARE_SEC to zero if you only want to use altitude.
Similarly, can I also set LAND_PF_SEC to zero if I only want to use altitude?
Thanks,
Paul
When using a rangefinder the documentation says you can set LAND_FLARE_SEC to zero if you only want to use altitude.
Similarly, can I also set LAND_PF_SEC to zero if I only want to use altitude?
Thanks,
Paul
Yes. And if you set LAND_PF_ALT to zero, you just won’t have a pre-flare.
What exactly does this “Rangefinder engaged at 4.12m” message mean?
I have the pre-flare stage set at 3 meters and the flare set to 1.5 meters, both worked wiht this TFMini unit.
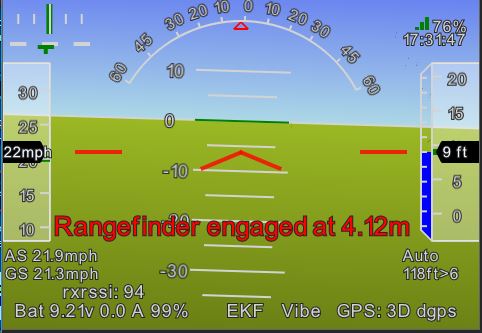
Note that the TFMini rangefinder comes alive at about 6 meters over grass.
Thanks,
Paul
May be related to this :
During the approach, the glide slope is actually calculated to pass through a point in front of the LAND waypoint. The distance in front is calculated as groundspeed * flare_alt / TECS_LAND_SINK, where flare_alt is LAND_FLARE_ALT, or LAND_FLARE_SEC times glide slope sink rate.