when I try to tune a hexa-copter with Pixhawk 6C FC and Hobbywing X-9 power system, I stopped Auto-Tuning after roll axis tuning complete before completely tuning 3-axis because of battery power.
I need to completely tune all 3-axis. So, if I want to tune only the remaining pitch and yaw axis for the next time, I must write parameters for completed roll tuned values. So, which parameters do I need to fill for roll tuning values?
Is ATC_ANGEL_RLL_P for roll angel p?
Is ATC_ACCEL_R_MAX for maximum acceleration?
Are ATC_RAT_RLL_P, ATC_RAT_RLL_I and ATC_RAT_RLL_D for roll rates P, I and D?
Please help me.
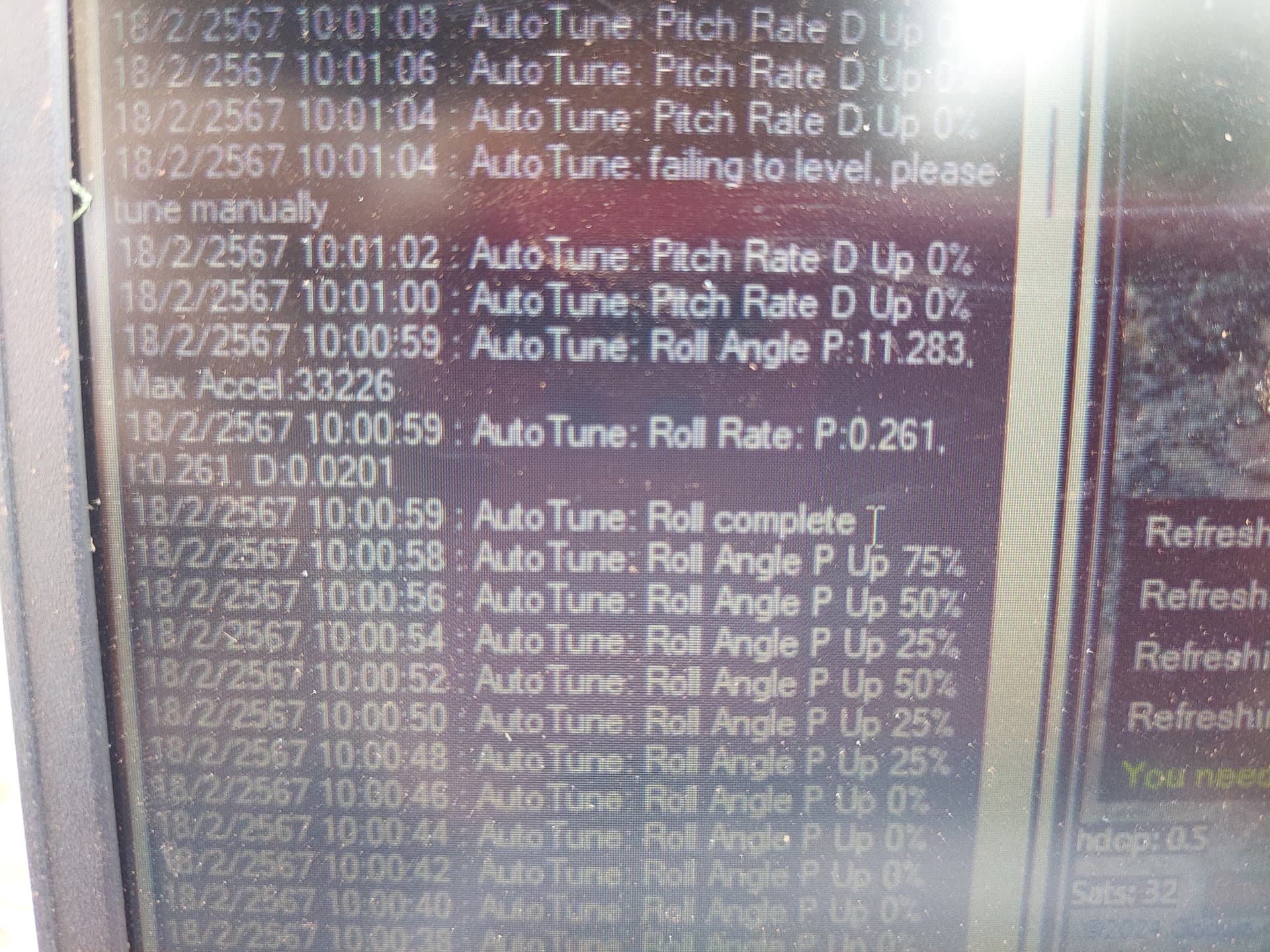
Here is the completed roll tuning values.