Hello Bill,
I did as you suggested. surprising was this time the AT frequency sweeps started without giving the “failing to level” error. I did not change anything except for the axis and seq.
Also, does the auto tune tunes the Rate-I too, cause, i had the I value at 0.1, now its changed very slightly.
First did the AT for Ang-P for pitch and roll together, it failed, increased the max frequency to 100 and got the AT success message.
Log file: 022
https://drive.google.com/file/d/1Jq-Xy1Pisajpy6Rsv-kHZp9U7bpe1cKl/view?usp=share_link
Next tried AT of Yaw D & P, changed the Gain max to 1.0 and max freq to 70 and tired the AT, the AT sweeps went on for a very long time but did not complete, had to land the heli to replace the batts.
Log file : 023
https://drive.google.com/file/d/1OemQYQACP9Muugr_sXvPuN4SpsoI8Bqb/view?usp=share_link
Keeping the default values for the Yaw D & P (D=0.003 & P=0.18) went ahead and tried the AT for yaw-Ang-P, this got done.
Log file : 025
https://drive.google.com/file/d/1kHhHOaQOCNkn1Vs-vIhq94AiYuAW8TJG/view?usp=share_link
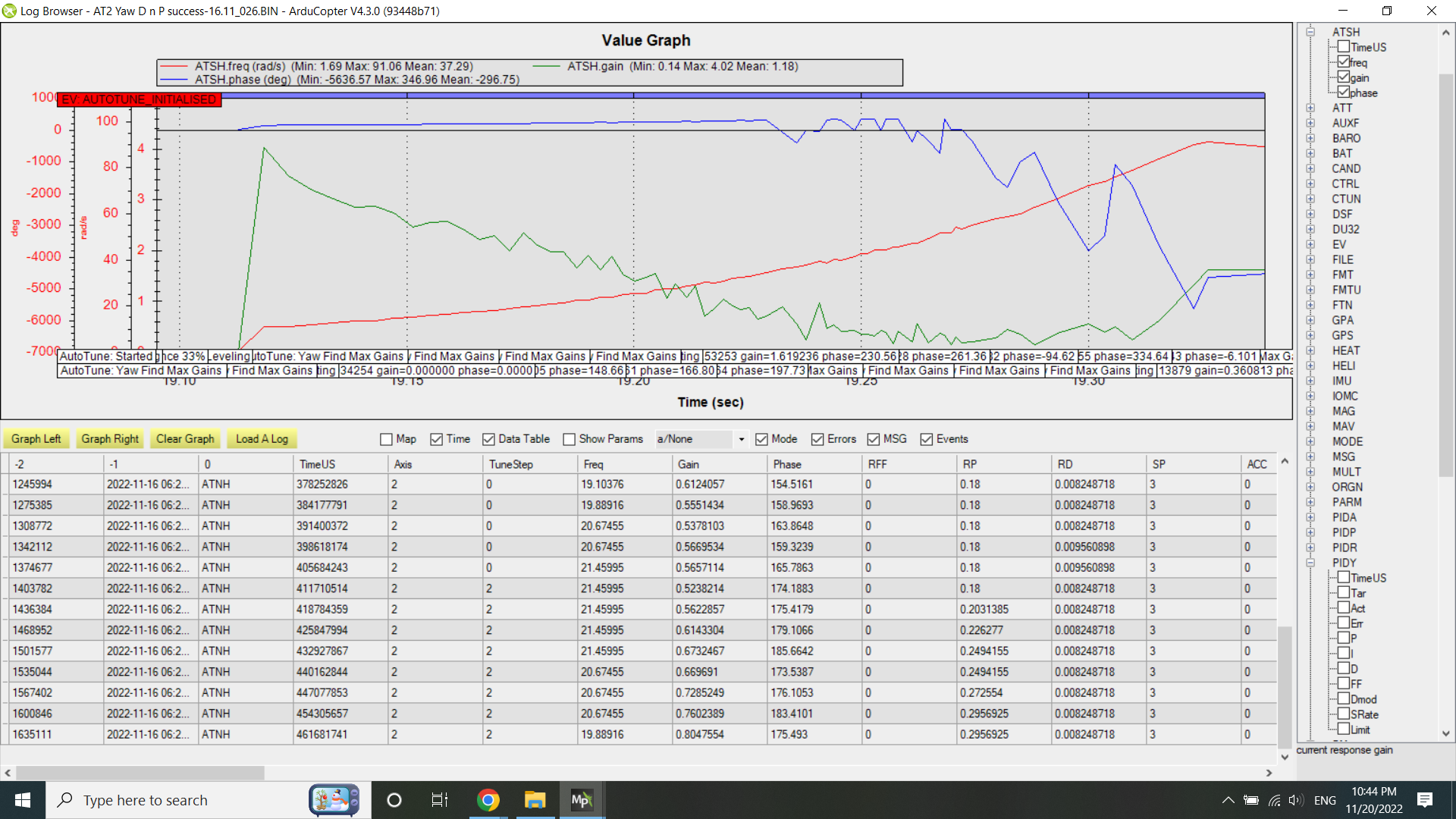
Tried re doing AT for Yaw D&P, (with max gain at 1 and freq at 100) the AT was success
Log file: 026
https://drive.google.com/file/d/1r1czY28WlYWT4o7n5OB0w4j-w3dW5YTQ/view?usp=share_link
After the Yaw D&P was success, keeping these newly AT values re did the Yaw Ang-P AT again, this too was a success but with the yaw AT D & P rates after the AT yaw-ang-p tuned, the tail was not stable and was osscilating.
Log file: 027
https://drive.google.com/file/d/13_j5f7HTxNXa6ACxMlPwMxVvGwoGXEc2/view?usp=share_link
As the tail was osscillating and when tail input was given and the stop was very sharp, hence, redced the AT yaw-P value from 0.272 to 0.20 and yaw-D value from 0.008 to 0.007 and re did the AT for Yaw-ang-P again. with this AT success, the tail was good and was not osscillating.
Log file: 028
https://drive.google.com/file/d/1CFGPk7_DGxV3mOOX1X-wXF9lrBl64S4E/view?usp=share_link
With this done, wanted to try the AT for Rate D & P for roll axis again as earlier had got 0 for the Roll-P value, Did in max gain 1 and in max gain 1.8. With max gain at 1, got D at 0.0006 & P at 0.0303. With the max gain at 1.8, got D at 0.0003 and P at 0.123. The PWith max gain at 1.8, in the later part of AT, the roll sweeps get more aggressive visibly.
Log file:031
https://drive.google.com/file/d/1GHCOWXpvhNdaex5O0bR3vm4JUCT9OzWj/view?usp=share_link
Here, i faced a minor problem, after i got the message “AT success” i switched over to Alt-hold and switched back to AT to check the tune, but when i switched back to AT, the freqency/roll started again and during this the message i got is ':Pilot testing". I had to again switch back to Alt-hold and switch to AT, now it was ok and could land to disarm. Redoing this, gave me D at 0.0006 and P at 0.124. Without changing any other params, by doing the same AT consecutively, the P value remained almost same but the D value doubled. ( earlier it was 0.0003 and now its 0.0006)
I did this Roll D & P again cause of the above problem, and on both occasions it did the same.
Log file 032
https://drive.google.com/file/d/1qyPmXK-Ajmny5ypngh1HiyhKd6egsmLX/view?usp=share_link
Will do a loiter flight and an small auto flight and check and update you in a day.
is there anything else i need to tweak?
Hope these logs help.
Thanks for all your help Bill.
Thanks & Regards,
Adarsh