Hello everyone,
I have flown in poshold mode several times. And recently wanted to try auto mode.
I switched to auto mode after takeoff. When the mission began, the heli didn’t go to the waypoints. Instead, it stayed around the takeoff point. When I checked the logs I saw the “reached command 1” and “reached command #2” messages. Why does this problem occur and how can I solve this?
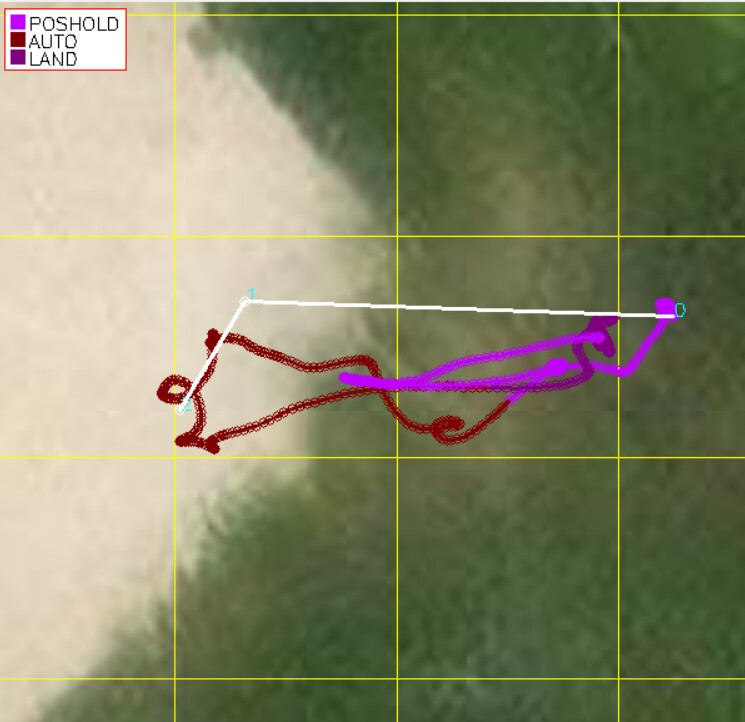
In this you can see the flight path overlaid on the mission route. There’s a lot of wandering in the position data, especially if you say the heli just stayed at the take-off point. So, like I said earlier, the heli thought it was close enough to the points. If this was a multirotor or plane I’d say it needed some improvement on it’s tune or setup, but I’m still a novice when it comes to heli tuning so I’ll leave that one out.