I tuned my copter and then I started autonom flights. But It’s losing altitude like 1-2 meters. I have some ideas about why it can happen.
- There is a paramater named PSC_POSZ_P. Default value of this paramater is 1. I tried changing this paramater to 1.5 then 2. But I didn’t see a big difference. I tried also with 3. Then it started oscillating. So I didn’t changed this paramater more.
- PSC_ACCZ_I and PSC_ACCZ_P I changed this two paramaters to
PSC_ACCZ_I to 2 x MOT_THST_HOVER
PSC_ACCZ_P to MOT_THST_HOVER
as described here. But in this page it says:
The Throttle Accel PID gains convert the acceleration error (i.e the difference between the desired acceleration and the actual acceleration) into a motor output. The 1:2 ratio of P to I (i.e. I is twice the size of P) should be maintained if you modify these parameters. These values should never be increased but for very powerful copters you may get better response by reducing both by 50% (i.e P to 0.5, I to 1.0).
for know I setted this paramaters to:
PSC_ACCZ_I to 0,343833
PSC_ACCZ_P to 0,1719165
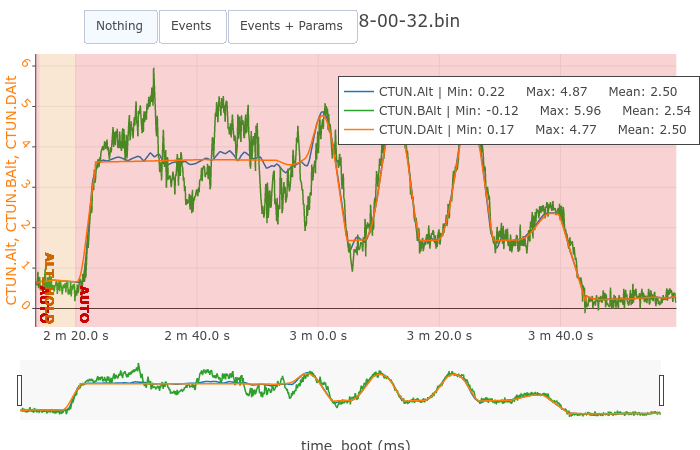
- when ctun.balt(baro altititude) goes down (a lot) ctun.alt changes just a little bit.
at 2m 40.0 s it’s really goes down like 1-1.5 meters but ctun.alt changed just a little bit (like 10 cmeters).