I am puzzled by my traditional helicopter that sometimes, in the end of auto mode, a steady straight down descend during landing suddenly started to swing in large angles left and right, back and forth (just like a feather or a leaf falling from sky), and caused minor crash in the end when it touched the ground non-horizontally and away from the home location. I don’t know what caused this phenomenon as it happened only sometimes with the same flight plan. Is it caused by strong wind gusts?
Could someone please look at my dataflash log 2025-06-01 12-26-43.bin and help me to find what went wrong and the solutions to this puzzle?
I have not had a chance to look at your log, but do remember when a helicopter is descending into it’s own downwash, it can be very unstable air that it’s trying to navigate through. When possible, it’s best to have a horizontal movement while descending. I understand the autoland algorithm cannot do this at this time.
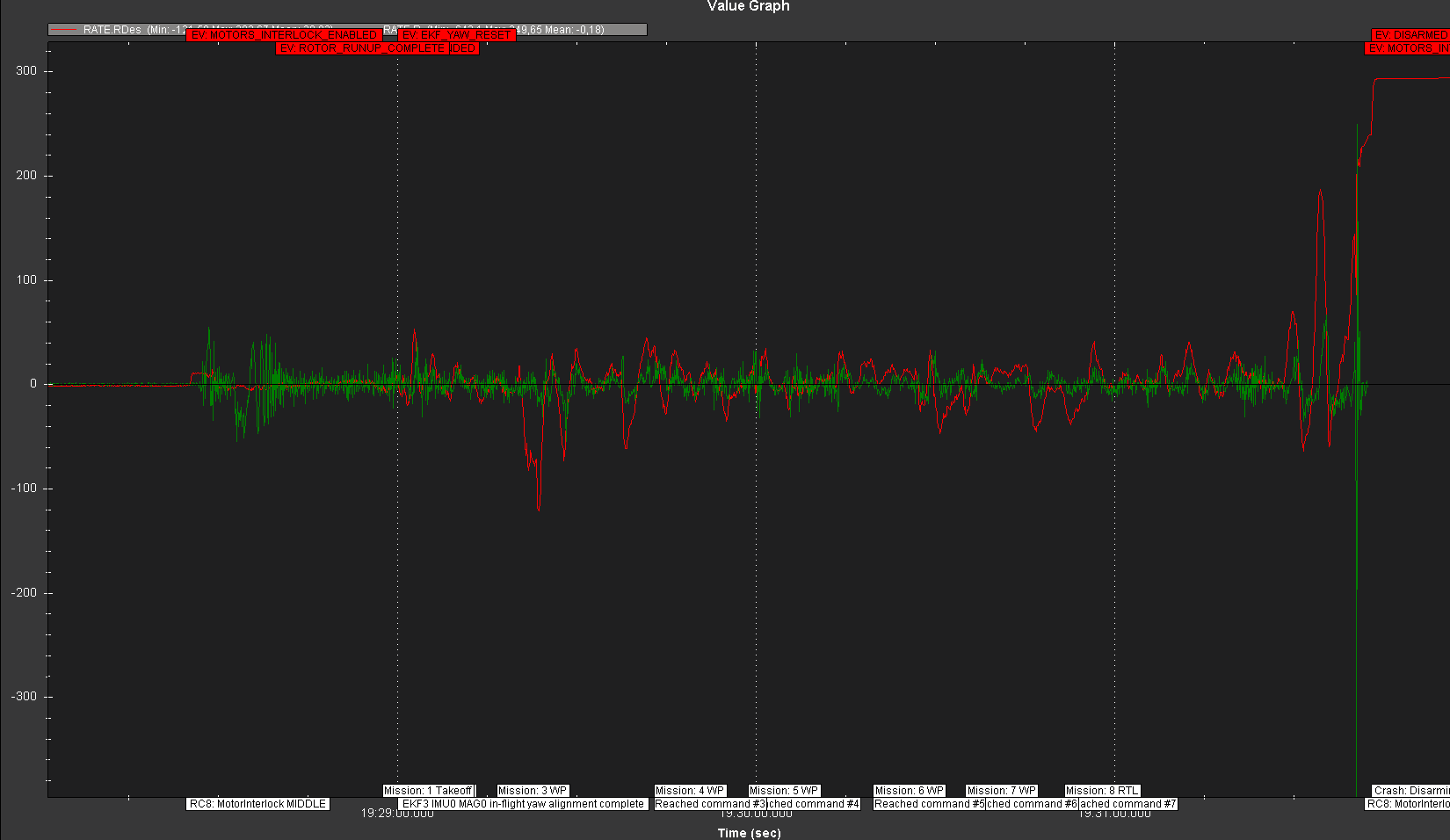
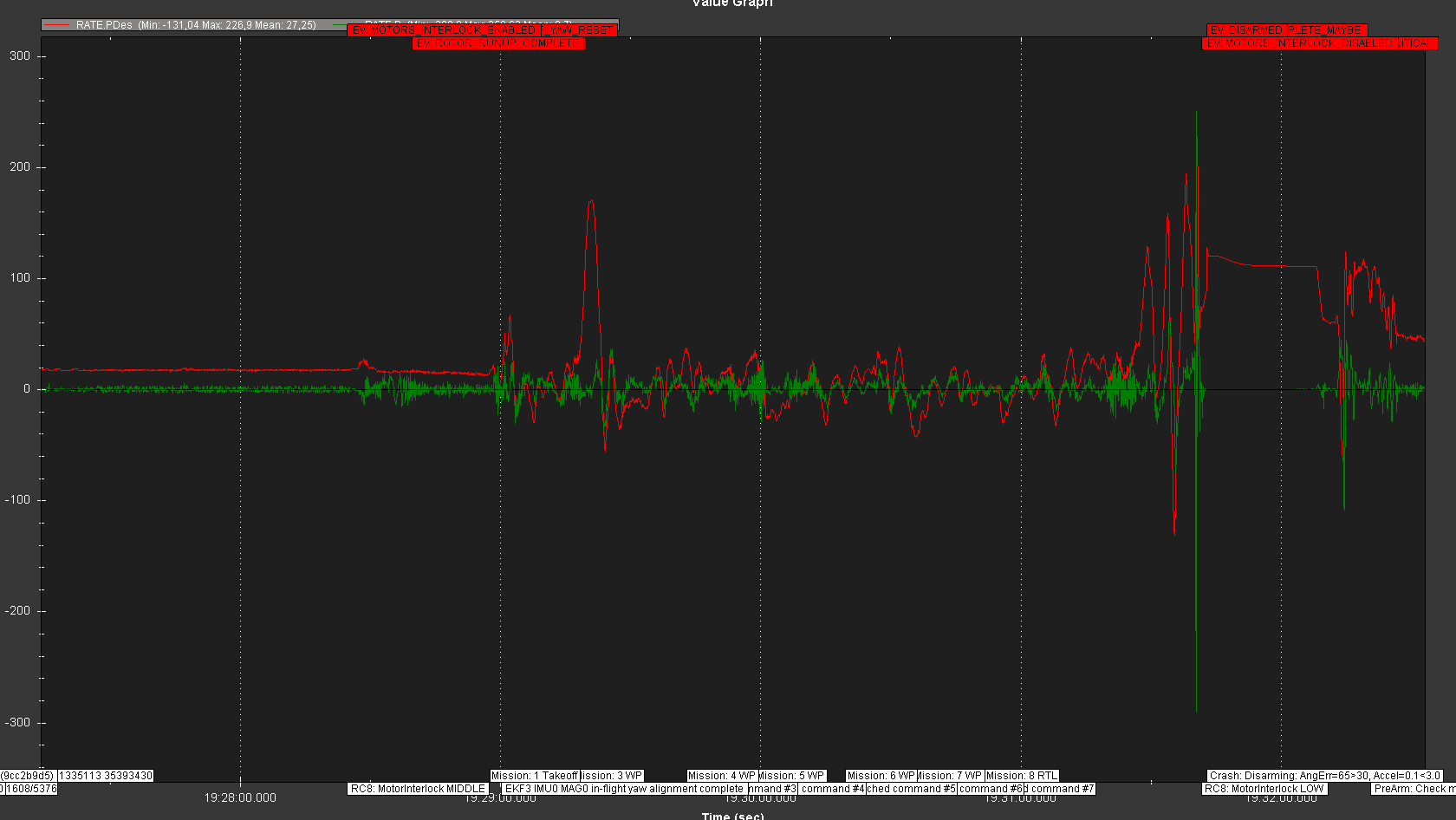
“not tight enough” Do you mean that the RATE.RDes and RATE.R’s amplitude of the peaks should be closer? Should I adjust ATC_RAT_xxx_FF, ATC_ACCEL_x_MAX and ATC_INPUT_TC to make them closer or what other parameters to tune to make the amplitude closer?
I am using “Manual Tuning” as the “Autotune” cannot finish in step 4, roll and pitch angle P (it emptied the whole fuel tank and the heli dropped to ground, still not finished).