I have a pixhawk with 3.3.3 and i m very happy with.
I use a lot of auto missions and i want to ask something about
I draw auto mission in tower app and as the copter follows the path i have draw, i move my gimbal to take the shots i want, but because i dont have a slipring i can move the yaw -90 to 90 so sometimes i loose some shots.
Is there any way to make the copter not facing front when a auto mission is start but left or right or even back?
I m making this question here at 3.4 so if the developers like my suggestion to make it happend at 3.4
Thank you for your time and i hope you understand my greek thoughts writen in english…
Should be WP_YAW_BEHAVIOR=0. Then you take off point the direction you want then do the auto mission and the copter will stay the direction you pointed.
But i think it could be great if you could change the face of the yaw after you start a mission , lets say after waypoint 5 set the yaw from looking north to looking south…
Use Condition_Yaw commands and you can point the craft in any direction you like during the mission. Either relative to a current heading or to an absolute compass heading depending on how you configure the parameters.
If you are flying LOS in Auto, after start of mission, you can adjust the yaw with your controller.
The other option is setting the YAW in your mission plan. One should note that WP_YAW_BEHAVIOR setting is very important here. I usually have it set to 1= point to next waypoint. You can change this as needed, or do what I do which is leave it the same and adjust my mission plans to accommodate.
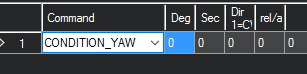
Under commands, CONDITION_YAW can be set anywhere in the mission. If WP_YAW_BEHAVIOR=0, you can set it once and it remain the same, if WP_YAW_BEHAVIOR=1,2,or3 CONDITION_YAW will reset to these settings after each waypoint. Therefore a CONDITION_YAW would be necessary after each waypoint.
CONDITION_YAW settings are:
Deg=degrees of yaw
Sec=not used
DIR=1 to change yaw cw, -1 ccw
REL/A= determines how “Deg” in first block is handled 0=absolute heading means compass heading in degrees 1=relative to current heading such that Deg setting of 90 will turn vehicle to “3 o’clock”.
Once you learn CONDITION_YAW and DO_MOUNT_CONTROL, you will master auto waypoint flying with a camera and gimbal.
When i start a mission and i have draw at mission planner my mission but the mission is too big and the batterys goes off
When i change batterys and power on could the mission start from the point that failsafe engage in the middle of the mission and copter rtl to change batterys?
@cookmangr,
There’s a request on the issues list to all resuming the mission even after a battery reset but I can’t make any promises at all that it will get done soon. An alternative is to use the ground station to set the active mission command. There’s a drop-down on the Flight Data screen’s Action’s tab with a button beside it labelled “Set WP”.