This week we were doing tests with a large hexacopter (Tarot X6) on strong winds. The missions was set to takeoff, fly some waypoints and then land ~2km away from the takeoff point. During the flight we noticed that the copter was trying everything to keep its altitude (35m), but the strong wind was pushing the copter higher and higher. It looks like the behaviour in this case is to stop the copter, descend to 35m, and then resume the mission to continue the navigation to the destination.
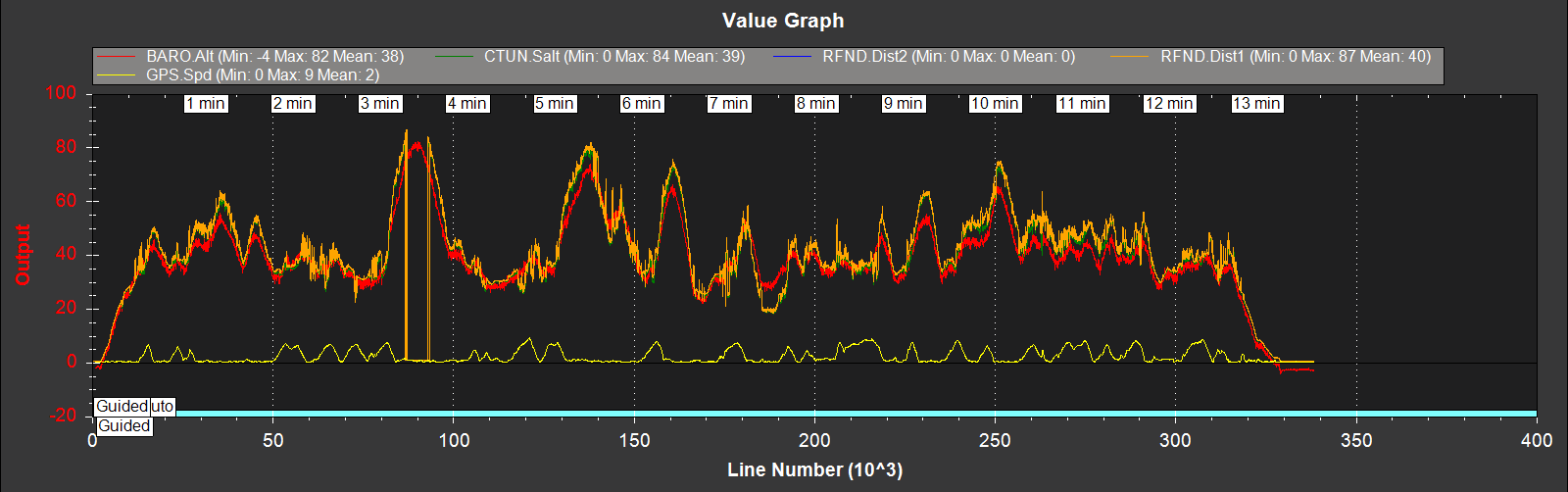
I’m looking for some help to change parameters in order to make the copter continue the navigation instead of stopping, descend, and resume. We were able to complete the mission but it took too much time to get to the destination because every time the wind pushed the vehicle higher, it was stopping and descending to the programmed altitude. For example, is there any way to make the chart below as flat as possible in order to keep the horizontal speed?
What you see is due to extreme vibrations: plot VIBE.VibeZ
With the amount of sensor clipping I see, it’s impressive job of the ArduCopter /EKF to keep flying that thing.
It was definitely a hard flight with a hard landing with all that wind. Do you think the wind could be responsible for such high Z vibration? Or would you point to frame, motors, and propellers issues. The flight was done with Cube Black hard mounted on the frame.
it’s the mounting, maybe prop/motor related
Just try some hover in nice conditions.
propeller tracking, imbalance, lots of things can result in high Z vibrations, - also turbulent wind, but not to that extent.
Do not hardmount the cube (it’s carrier board) to the frame, always dampen, you are flying hexa, so you can fly fine with an damaged, loose or partially disintegrated propeller, this redundancy is something you give up if the damaged prop can easily saturate the accelerometers because the flight controller is hardmounted…