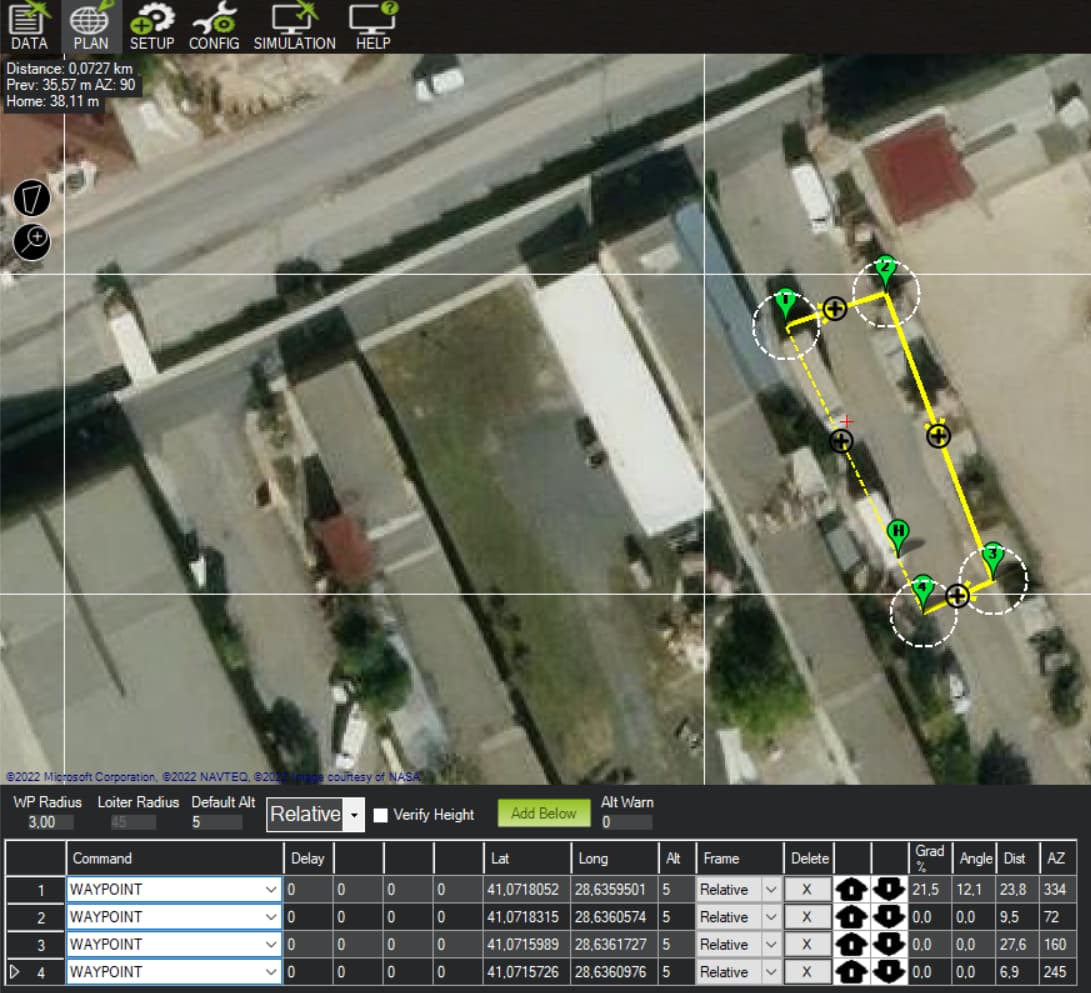
I planned a simple task. It will travel around 4 points and come back to where it started. When I upload the task on autopilot and select auto mode, the vehicle starts to spin around itself. You can find the video link of the problem below. Can you help with this.
In my motor driver, the left two motors are connected to one channel and the right two motors to one channel. In manual operation, the wheels move in the right direction.
I think I set acro mode. Attached you can see my settings.