Hi everyone,
I have a problem with automatic missions, and I would like to kindly ask advices.
I use a quadricopter with pixhawk and AC3.4.4. with gps NEO M8N (GPS + GLONASS). The quad flies beautifully most of the times, in both manual modes and automatic modes.
Occasionally, after having correctly sent a mission waypoints to pixhawk (via the telemetry 3DR), during the automatic mission quad hangs to a waypoint (remaining in AUTO MODE) and stays here for a long time (over 30seconds).
It happens relatively near to the ground station (not over 100m in LOS from the pilot). Sometimes it starts again after switching to LOITER and again in AUTO, sometimes there is no way to restart it (we need to abort the mission and land manually).
I think that the mission is correctly sent to the pixhawk, because if I click “read” on the mission planner, it loads exactly the mission as I loaded it, and the attached .txt file is free from syntax errors.
The waypoint radius is fixed at 2m. the mission has about 40 waypoints, wich is not much. Also, from logs we can see the HDOP is always about 0.8, which is good, and the satcount is always 10+. I cannot see any strange behaviour in the log files. The location of the flight is a very wide open area, with excellent sky view.
What could be the problem? What part of the system could hide the bug?
What else can i look for into logs?
Unfortunately I have no longer access to logs because the quadricopter belongs to a customer.
However, i’ll post here the mission file and the .BIN log file as soon as it is possible.
Thanks mboland, I will try to reload the firmware, thank you for the advice.
Hi everyone!!
Today our customer has had another bad experience with the autonomous mission.
He made two survey flight in the same area, with the same grid pattern, except for the flight altitude (the first flight at 30m, the second flight at 70m).
The first flight went wery well, but not the second flight.
During the second flight, once the quad have started the auto mission, it hangs at the first waypoint. Consequently, the pilot siwitch from auto to loiter several times until the quad starts again his way to the second waypoint. After that, in the middle of the segment between WP1 and WP2, the quad starts to rotate the yaw 90 degrees left and right, and then continue his way to the second WP.
Fortunately I have all the logs of the two flight, and the Mission File. The first flight starts at 12:01 PM, while the second flight starts at 12:2 7PM.
BTW, the firmware used today was the lastest 3.4.6 available.
Sincere gratitude for any advice on this issue.
Fabio
I can’t give you a definitive reason for the effect that happened but I can point out a couple of contributing factors.
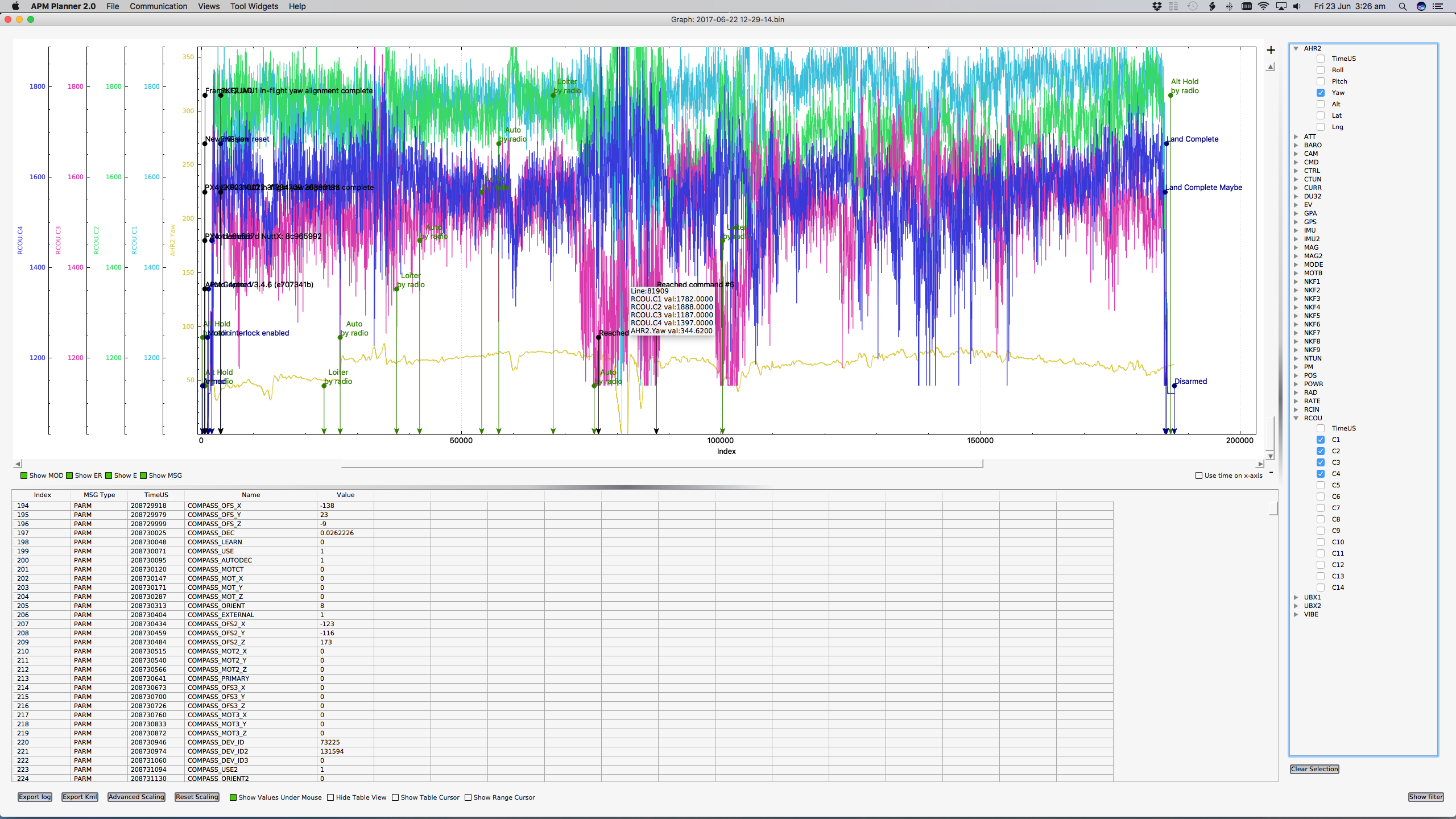
The quad is underpowered, as the outputs are near max the whole flight.
This does not leave much room for maneuverability.
Motors 3 & 4 are less than 1 & 2 which would indicate an unbalanced quad.
Have you balanced the quad with payload attached?
The Motor/compass calibration has not been done.
thanks mboland for your effort!!
this quad isn’t too much underpowered, but unbalanced for sure, we are aware about that. thank you anyway.
We have look deeper into logs and we figured out that when we use CONDITION_YAW command, the quad can fail the autonomous mission (stopping at a certain WP). For instance, if we check the box “heading hold” into the “auto WP Survey” box, the subsequent mission file is populated of CONDITION_YAW command after each waypoint.
We noticet that this kind of mission is likely to be unsuccesful.
Can the AC 3.4.6 have some bugs when using the CONDITION_YAW command?
Our WP_YAW_BEHAVIOUR is “never change yaw”.
Maybe this settings lead to an incomatibility between command and the degree of freedom of the quad?