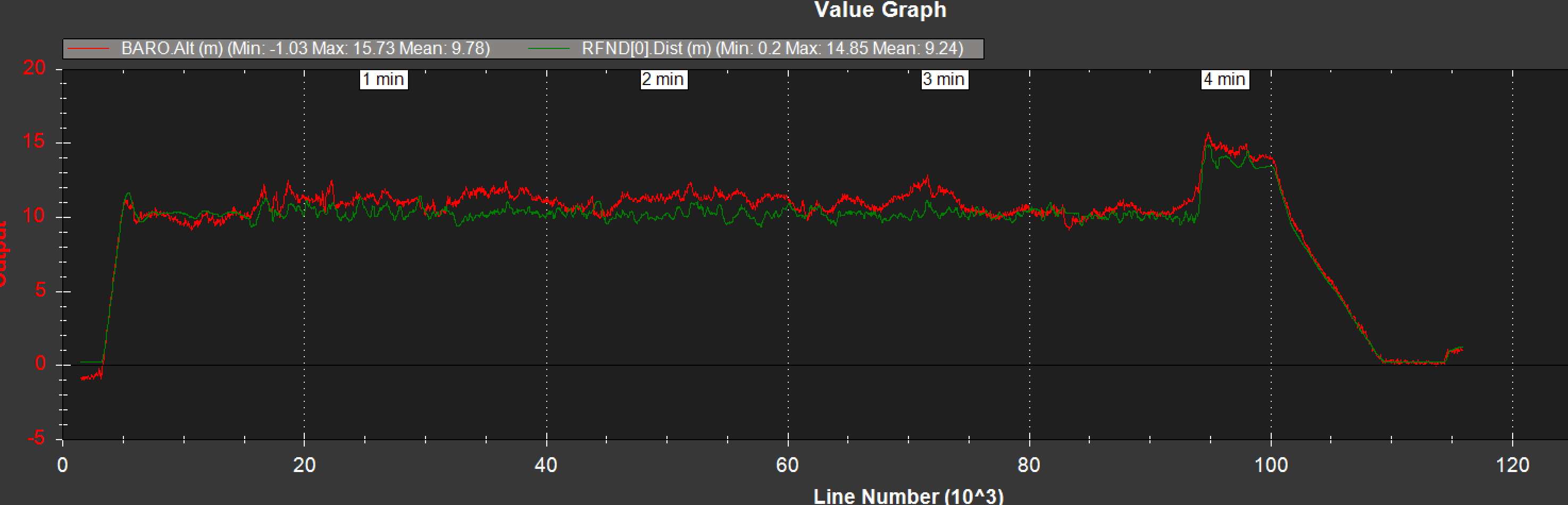
I noticed a behaviour I can’t explain. After finishing Auto Mission, the copter climbs a few meters and fly on this altitude back home. RTL_ALT is set to 500. Why does the copter climbs from 10 to 15 meters? I have this behaviour on all of my copter with 4.0.3.
Yeah, I know, but the flight altitude is 1000cm (10meter)… but I probably find the reason. MOT_THST_HOVER is only 0.24… It seems that the flight controller can’t reduce as much as needed…
Your rtl alt is set at 300 cm, so it should have stayed at 10 meters during rtl and land. It looks like it climbed to 15 meters, wich is default for rtl alt. Maybe a little bug.
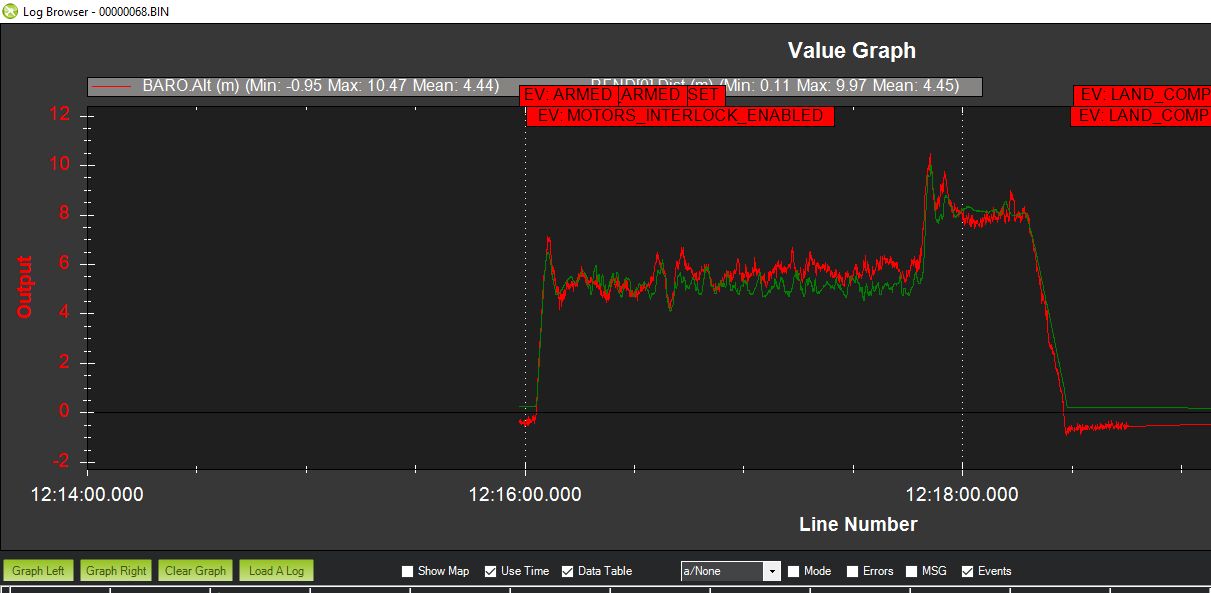
I first also thought that arducopter climbs to the default 15 meters. But if the drone fly on 5 meter, it overshoots to 10 meters, then fly home on 8meters…