Hi all, new to the forum. Thank you all for your great contribution.
I have two copters, one X8 and one hexa (Tarot 680Pro), both controlled by Pixhawk with arducopter 3.4
Radio is Taranis, and receiver(s) are X8R using latest EU firmware.
Receiver connected to Pixhawk using SBUS for all channels CH1-CH16.
Receiver also setup to provide CH9-16 out on X8R for manual connection of peripherals.
I want to setup the landing gear feature so that the landing gear auto deploys on RTL/Land.
From what I read, this now (3.3 RC6) works. But I am unable to get manual control at the same time as configuring an AUX port for the landing gear.
I have searched, but I am unable to find a specific answer to this. This should be so logic, however it is not, to me.
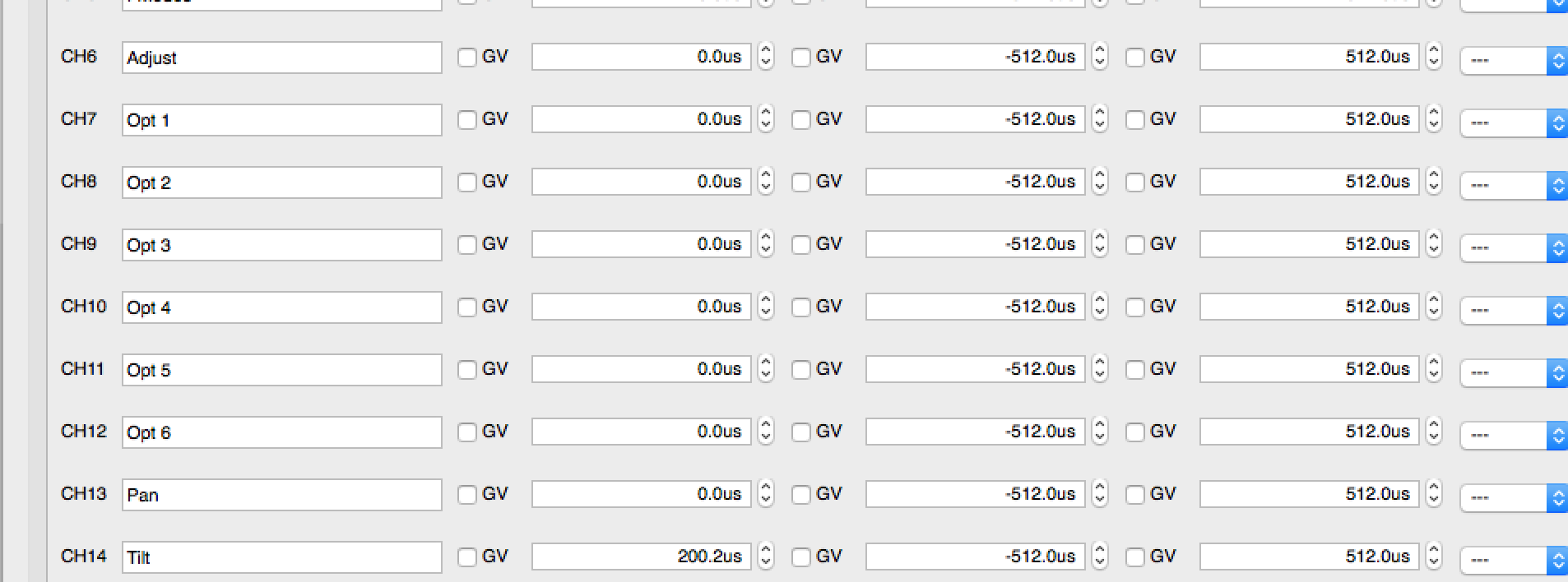
I am planning on using AUX1-3 (CH9-CH11) for gimbal pan/tilt/roll control.
So AUX4/CH12 is available for landing gear setup. (To my understanding AUX5-AUX6 is not working, unless enabled as RELAY). But I am fine with AUX4. Will control camera trigger and gimbal mode directly through X8R.
According to ardu wiki I should then setup RC12 function to 29 (for landing gear) so that controller knows where landing gears are connected when RTL/Land is enabled, and then setup CH7 or CH8 for manual landing gear control.
Landing gears are powered by separate BEC providing a stable 5V, and a separate connector with signal only controlling the state of landing gear.
Landing gear works if I connect them directly to X8R receiver, or if I connect them directly to AUX4 (CH12) on Pixhawk/Pixraptor, and enable RC12 function 1=passthrough, or 62=RCIN12 (ch12 is my landing gear switch on radio).
But when setting RC12=29 (for landing gear), there is no way I manage to also getting manual control over the landing gear. I have tried setting Ch7, CH8, and even other channels to 29 (landing gear) (and of course checked and used the correct corresponding switch/channel on radio)
Right now I have set CH12=29 (landing gear) and RC12=62 (Ch12 input), and I am able to manual control the landing gear via AUX4 on Pixhawk. I am unable to test if auto deploy works due to heavy weather here now, but according to wiki setup it will not work unless RC12 is set to function 29, so currently I only have manual control of the landing gear.
If I set eg. CH7 to landing gear, how does the controller know that the landing gear is connected to AUX4 when I use CH7 switch on radio? By setting RC12 = 29 ? Obviously not, this does not work. There is some missing link here. The controller does not pick up the inputs from CH7 and forward them to AUX4.
What am I missing here?
How should I setup to get both auto deploy in RTL/Land working, as well as full manual control?
Any help will be greatly appreciated.
 I have always had the setting BRD_SAFETYENABLE=0 on all my copters, and hence the retracts work on the bench just fine for me.
I have always had the setting BRD_SAFETYENABLE=0 on all my copters, and hence the retracts work on the bench just fine for me.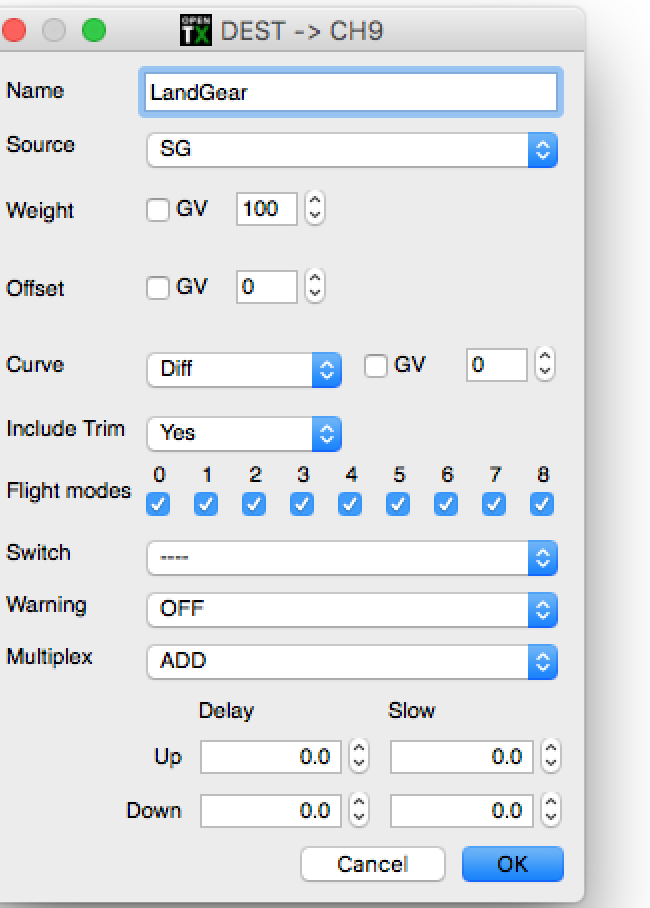

 ) .When land is activated i see the landing gear “deploy” this is now okay ! does this mean it will work in RTL ?..I’m still testing on the bench and not in the air ( all safety’s off).
) .When land is activated i see the landing gear “deploy” this is now okay ! does this mean it will work in RTL ?..I’m still testing on the bench and not in the air ( all safety’s off).