I am using the Auto_Grid feature for the very first time, and I need experts to explain few parameters which are automatically generated.
I am flying a plane with 4.07 FW.
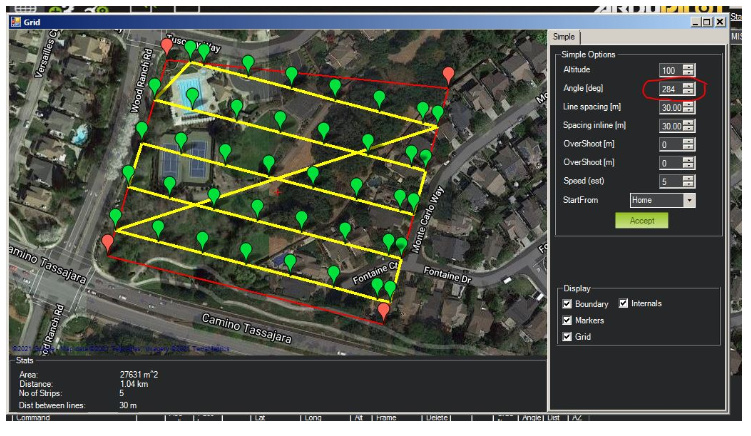
Question #1: After polygon is created and the auto grid is selected. A window pops up where the distance between waypoints can be adjusted. In this window, there is a parameter call Angle. What is this angle mean? I have also notice that this angle changes every time I create a new Auto_Grid. Please describe.
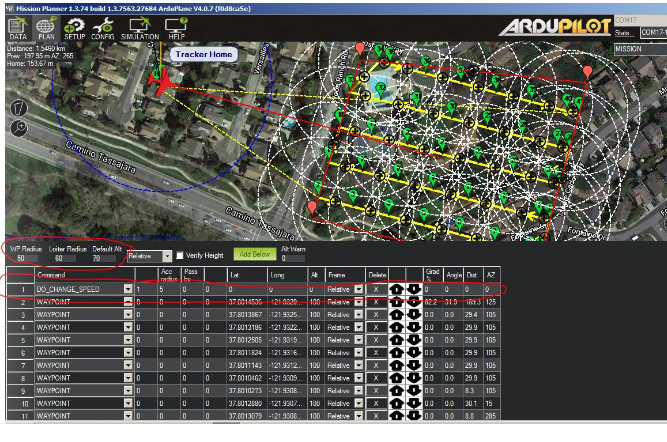
Question#2: Once I accept the Grid window, and the waypoints are created, the first waypoint is called “Do_Change_Speed” what is this means?
Question#3: Is the default alt ignored along with two other parameters (See pic)?
Angle means heading angle of the yellow path lines. You can change it and the paths will change. Do it to whatever that suits best for your grid search.
It is the horizontal speed that the vehicle fly during the auto mission.
Grid tool filled the altitude with the value that you set in the window.
Do_Change_Speed is not a waypoint command.
It just changes the default horizontal speed of the vehicle during the mission and it does not require altitude or location.
Also you can add multiple of them if you want.
Your questions are more related to mission planner so I moved the topic to mission planner category.
@Mustafa_Gokce, thanks for answering the questions. I notice in the Simple Auto_Grid option no information is displayed about flight duration time. Where can I find this info?
Also, there are two more fields call “OverShoot (m)”, what does this do?
@Michael_Oborne, could you please explain “OverShoot (m)” in the Simple Grid Survey.
I am flying a fixed-wing with a camera pointing down taking pictures every 0.5 sec, but based on altitude, camera sensor, and lens focal point the Gridlines are too close to each other.
I am guessing that the “OverShoot” parameters are how big of a radius plane will make to turn around in order to get to the next lane?
Overshoot creates an extra waypoint at the end of each survey line to define how far the plane will fly past the end of the polygon before it turns. Leadin also creates an extra waypoint for the plane to aim for before the beginning of the next survey line. You can use these to make sure the plane is on course for the lines rather than missing the first waypoint on the survey line.
There is two overshoot settings so you can alter each side of the survey grid differently, depending on wind or whatever variables you’re dealing with. Leadin will affect both sides of the grid the same.
How far you set them out depends on how fast your plane is, and how quick you want it to turn. These settings will not change anything with your camera settings.
That’s a feature that I added. If deselected, you may have one or more legs of the perimeter that cut inside the original shape. For mowing, I think most of us expect to catch the entire perimeter, so that option ensures it.