Hello!
Recently, I was flying a drone to shoot some nice shots. After a 20 minutes flight, I turned on the auto-analysis of the flight log. I noticed that the GPS has a high magnetic field. How could this be solved? I post a photo of the installed compasses on my drone.
Thanks!
Log File C:\Users\90baz\AppData\Local\Temp\tmp7D50.tmp.log
Size (kb) 76476.0498046875
No of lines 612230
Duration 0:20:45
Vehicletype ArduCopter
Firmware Version V4.1.1
Firmware Hash 01d1aa1e
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
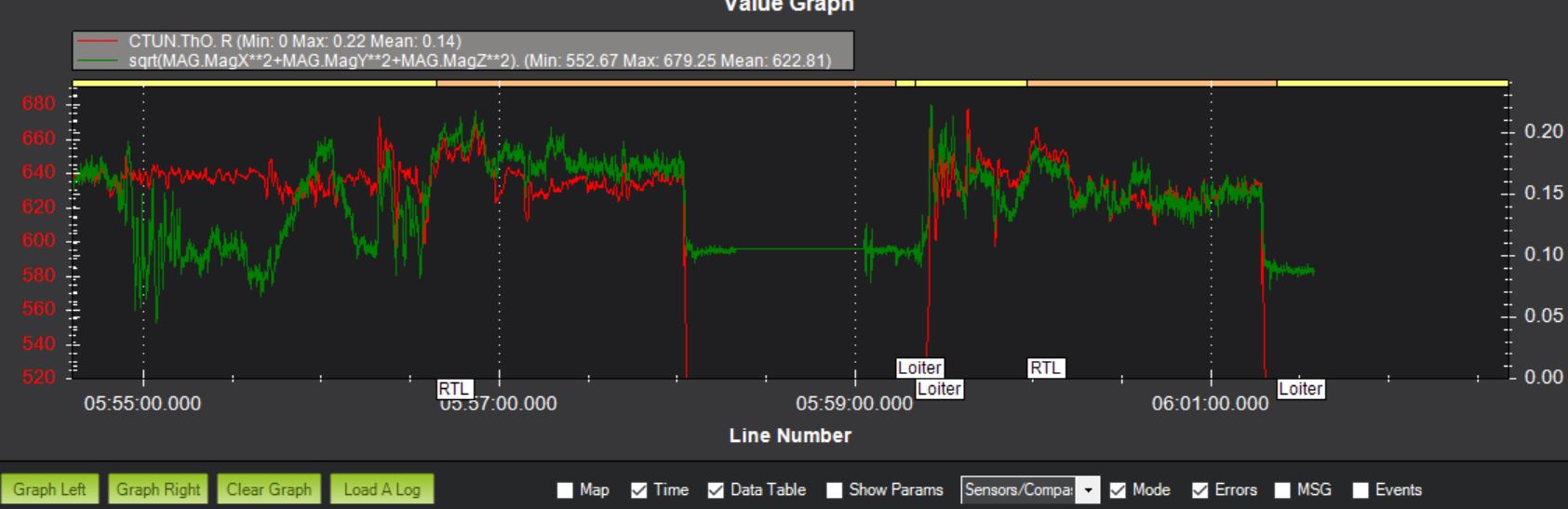
Test: Brownout = GOOD - Test: Compass = FAIL - Large change in mag_field (111.84%)
Max mag field length (683.37) > recommended (550.00)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = NA -
Test: Motor Balance = UNKNOWN - ‘HEXA/X’ Test: NaNs = FAIL - Found NaN in CTUN.TAlt Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data
The Auto Analysis tool in Mission Planner is not up to date. Do you have any other reason to believe there is a problem?
This is the best graphing too to use for this purpose. Some influence from current due to the relatively close proximity of the battery to the Modules but not terrible.
Until recently, I had problems with the compass, there were errors such as: EKF ground mag anomaly, In-flight yaw alignment complete, Compas variance and I had to switch from Loiter to Althold quickly to avoid crashing.
Since I installed stiffer GPS masts that don’t come into resonance and calibrated the compass separately, not on the drone, it works ok. Sometimes errors pop up, but not critical ones.
As you can see in the picture, I have the power cables quite close to the GPS antenna.
This isn’t the best method. Compass calibration generates correction for on-vehicle interference. Calibration should be performed with the compass’s in vehicle position as they are when flying.
Separately, I meant the unscrewed top plate of the frame, because on this plate you have the Pixhawk 4 and two GPS masts, so you don’t have to dance with the entire drone, which is quite heavy.