I was hoping some trained eyes could have a look at the tuning values I am trying to manually set up on the x8 I build…@dkemxr@xfacta have both been great help with all my copters , unfortunately the x8 will not autotune… The rate now seems good though the p value could be set lower … I mostly interested on suggestions on the PID as short flights - twitching look ok, but the log des att seems to be overshooting on roll and pitch badly…
I am hoping for some input on these values… Thanks
First fix the vibrations, which are not the worst but not the best either.
Then enable the notch filter data collection again so we can see what’s going on after vibration fix-ups
INS_LOG_BAT_MASK,7
INS_HNTCH_REF,0.375 can probably go down to 0.32 but we will know more after the above and a new test flight.
You should be able to set INS_ACCEL_FILTER back to default of 20 if the vibrations fixes work out well. I only change that if everything else has been done first.
The vibration is killing me - was up late trying checking props align, the wiring is as simplified as I can make it the gimbal is secure to the frame … ordered 4 rubber dampeners for under the main plate to replace nylon… the flight this morning shows very little improvement in vibe … the high rate on roll and pitch is not helping the vibration… attached is the log with fft logging to check that the notch filter is working…
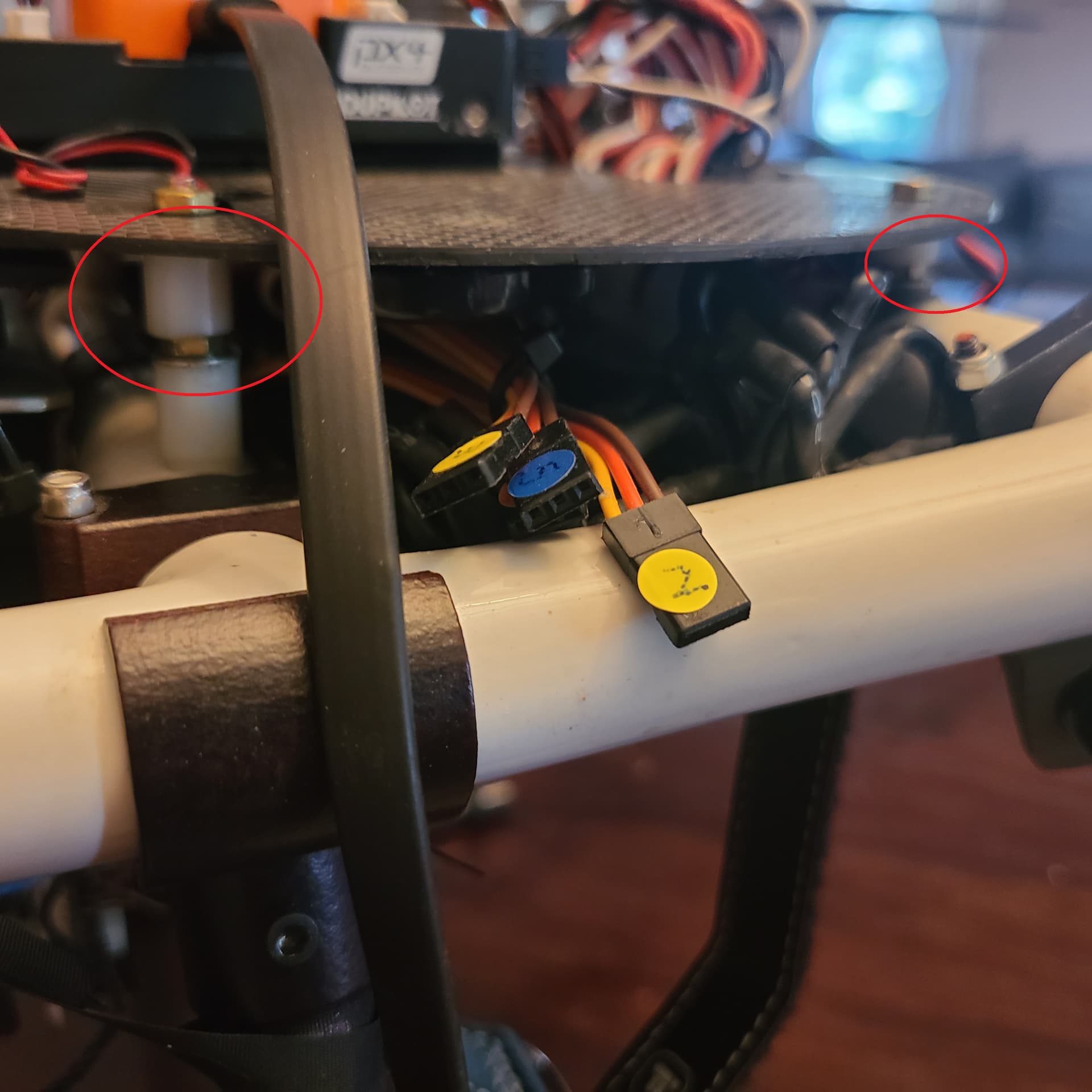
the image shows the nylon spacers I will replace with rubber… LOG_8-9
I think it would be better for you to keep that top plate hard-mounted and as solid as possible.
If necessary you could try this Cube antivibration mount. Generally antivibration measures are usually not recommended for Cubes, but in some cases there may be no choice.
I already looked at the log before, but I checked again and I cant really tell what changes to make until the vibes are fixed and there’s new FFT data and attitude control data to look at.
It’s actually going quite well considering the vibrations, attitude control is doing its best.
Ok, it will be a few days till i can get the vibe mount or have it printed mjf nylon … rubber mounts will be here before the weekend~ I appreciate yours and everyone’s help on these copters - the other 2 quads you helped on are working great and have captured some very large well noted projects - stay tuned… Thanks to you and all