Hey guys,
I’m having a problem during manual flights in Alt-hold mode without GPS.
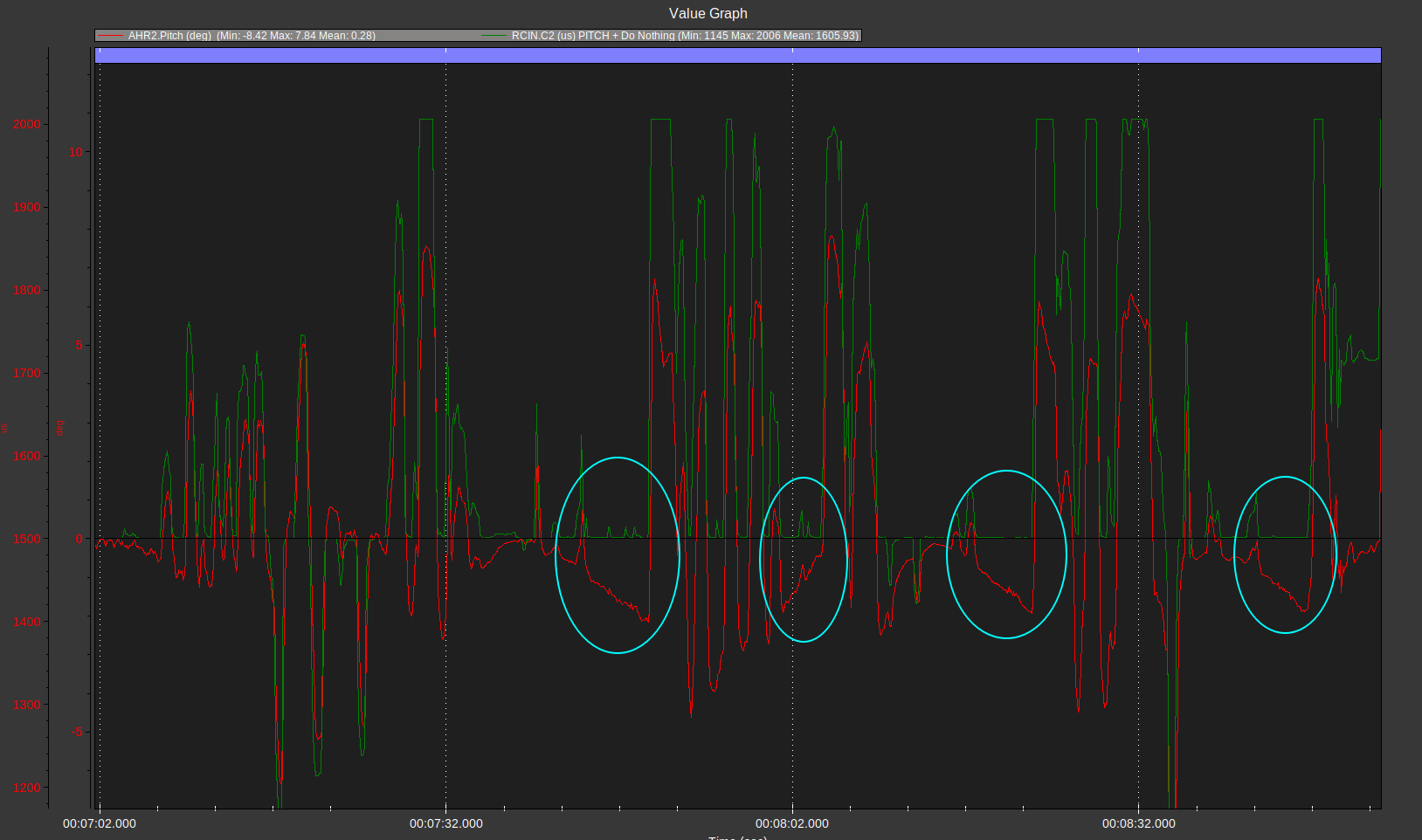
After takeoff the quadcopter gets to the the desired height and hovers. Sometimes during that hover or after a short flight the copter suddenly tilts on one or more axes and starts drifting. I can induce this sudden tilt if I fly the copter in a relatively aggressive angle for a short period of time (~4-5 seconds).
sometimes after a manual 360 degree yaw spin the drifts disappeared (and randomly appeared later)
When I first set up the copter I calibrated the acc through the mission planner menu - fo you think I should re-calibrate?
I manage to fly pretty good, the copter even keeps its height pretty well, its tgat specific problem that confuses me. Are the vibrations related to that issue or was it a general recommendation?
There’s a specific button just to calibrate level, you dont have to do the whole accel calibration procedure.
I just wondered if that would help the drift.
We have a flight controller that had failing IMUs, it thought it was flying level but really diving to the ground at crazy angles - so that can definitely happen too.
If I leave it turned on just sitting on the desk, eventually the HUD drifts pitch and roll quite a lot, much more than just heat-related.
Is that something that can be done by using the Harmonic Notch Filter? or maybe other arducopter features?
Or do I have to change it on a mechanical level?