Hi,
I have fun flying a Caddx vista on a 4" frame running betaflight. However on a 4" frame with caddx vista, you can’t record HD video (caddx vista does not have a SD card nor a recorder and it does not have a full HD resolution). What’s frustrating with such a quad is that you have a fully functional GPS you don’t fully exploit (useless in acro mode and can only serve with the retarded betaflight reutrn to home). Further betafllight does not have advanced features like arducopter has and certainly can’t fly autonomously with waypoints and mission commands.
If I wanted hull HD video on such a craft, I would have to piggy back a naked gopro or similar light weight HD camera solution but you ruin your quad’s weight with all of the consequences.
So I decided to build a 5" size quad running Arducopter, with ALL of the mandatory and optional hardware to be able to take advantage of all of Arducopter’s features: GPS, external compass, Full HD camera 1080p 60 fps at least, onboard SD card recording, OSD (for arducopter’s telemetry AND ESC telemetry), long range HD FPV video link to use with DJI goggles, 433 Mhz Radio telemetry, Barometer, self powered with battery “Lost beeper and buzzer” that I can activate with a switch on my radio, black box logging (for logs obviously), long range (ELRS) receiver. Did I miss something ? Probably.
This is still not a sub-250 but it was not the objective to reduce weight as much as possible (for that I would have used a Caddx Vista instead of a DJI air unit and I would have cut on all of the 3D printed parts). The objective was to have a 5", as light as possible, without any compromise on anything : good solidity, really useable in the field (not a lab quad ).
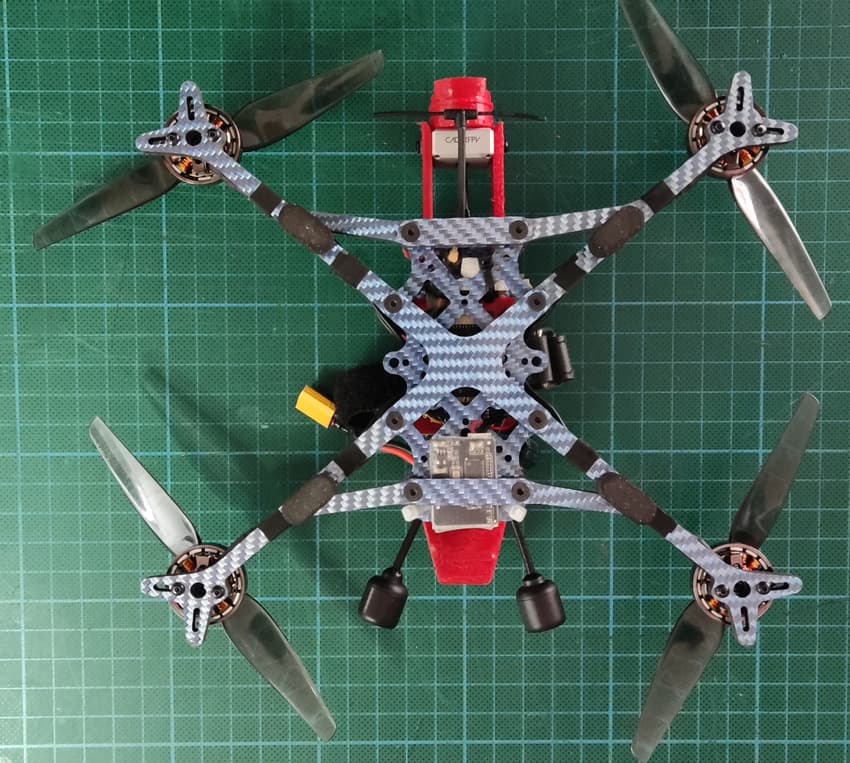
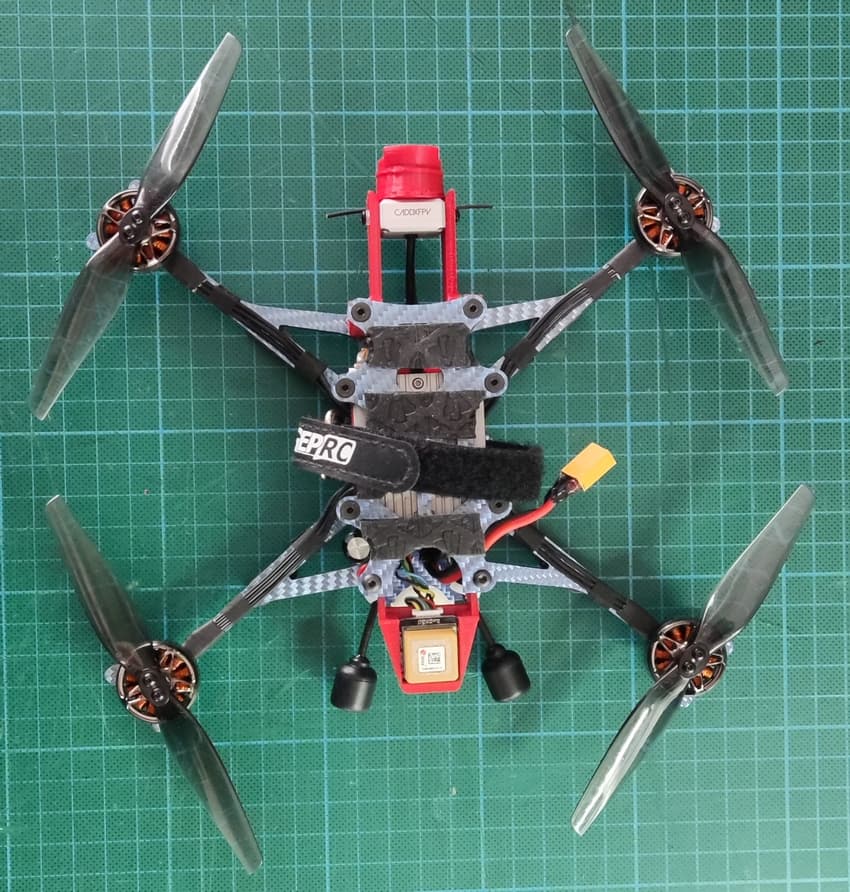
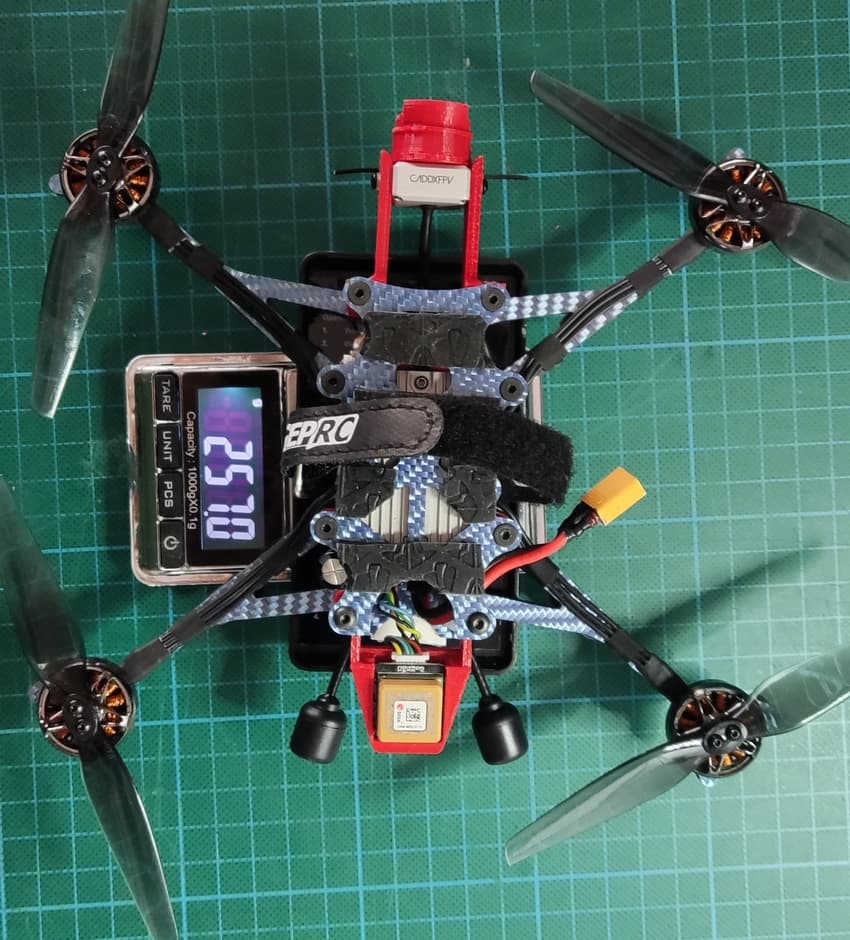
Here some pictures:

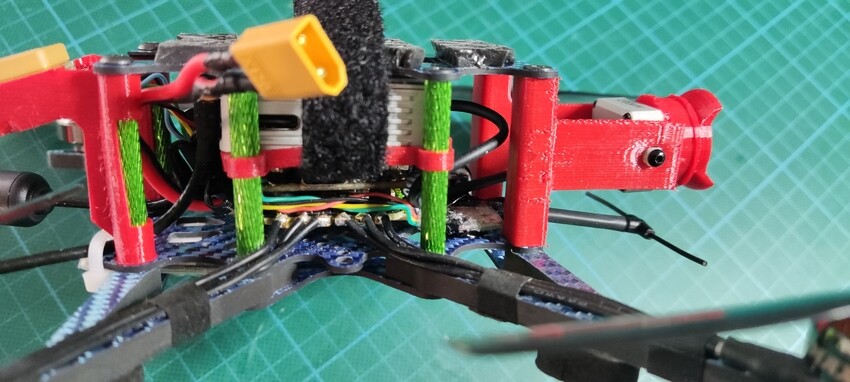
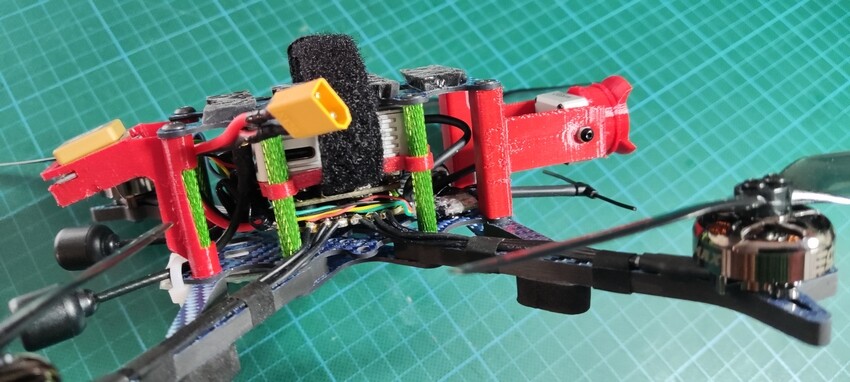
I had to use 35 mm standoffs to be able to stack vertically ESC, FC and DJI air unit. It has two 5.8Ghz antenna (for diversity). I placed the antennas along the arms so that they can’t vibrate in flight (traditional builds place the antenna on the back TPU mount but that creates vibrations in the frame during flight and it is a weak point)

Some umagrip pads are great to stick your battery on top (it is both very sticky and soft to dampen any schock on the battery):

A TPU mount holds the GPS at the back (horizontally because best results - The habit manufacturers have to position the GPS at an angle burried under antennas or to close to electrical interferences is quite bad)
Inside the TPU mount is hidden the ELRS receiver (a happymodel EP1)

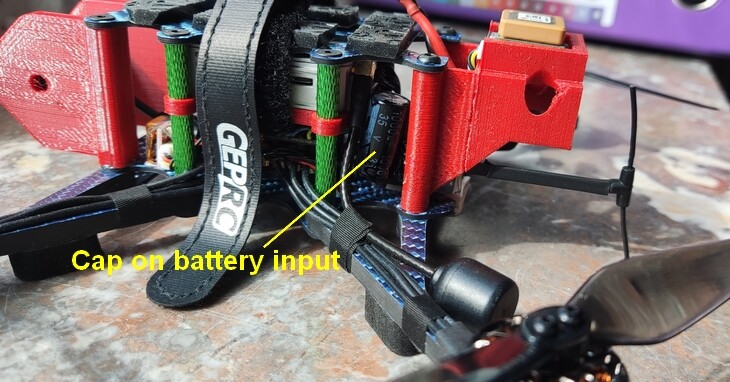
A capacitor on the battery input is not really required below 6S, but I put it anyway.
This frame with my vertical stacking mod allows free access to both the Kakute H7 mini USB-C port and the DJI air unit USB port:

This is the biggest weakness I found with arducopter on this build : having a functional buzzer on a non pixhawk open hardware. It simply does not work as it should. Best I could get are monotone buzzing sounds that do not even sound like they should (as compared with a normal buzzer on a pixhawk type FC). But I wanted a self-battery-powered buzzer that can beep automatically in case of radio signal loss and/or battery loss. One that can also be activated with a switch on the Tx to find the quad in case I would loose it in grass or in a tree:

I installed a micro telemetry unit on the bottom of the craft so that its (weak) PCB antenna is in direct line of sight with the ground station on then ground:

The frame is modded from the commercially available AOS UL5 frame by Chris Rosser (weight of 55 grams).
Propellers are HQprop 5.1 inch bi-blades which are more efficient that three-bladed props (if you’re not racing)
Motors are Eco max II 2004 2400Kv which give the best efficiency as compared with any other 2004 motor (cf Chris Rosser video on his youtube channel). 16g/motor.
all-up-dry-weight (everything, including battery strap and anti slip pads, except battery) of about 254 grams.
Cheers
Hugues