This project sponsored by AtomRC
The AtomRC Dolphin is a great FPV plane. Fast, long endurance, and easily transported.

Its size and nice flight characteristics seemed to beg for a conversion to VTOL. I have done many such conversions in the past, being a QuadPlane lover.
I wanted to do both a Tilt-Tricopter version and a TVBS (Twin motor Vectored Belly Sitter) version and this is an attempt to do both in one project. The Tilt-Tri first, and then by removing the rear motor, changing the tilt mount slightly, and moving the battery back, a TVBS version without much re-work.
AtomRC kindly donated the kit and some of the electronics.
Basic Configuration
- 3, miniquad motors with 30A mini ESCs
- 4, 9g metal gear digital servos all around
- 4s, 4000mah LiIon battery
- DJI Air Unit HD video
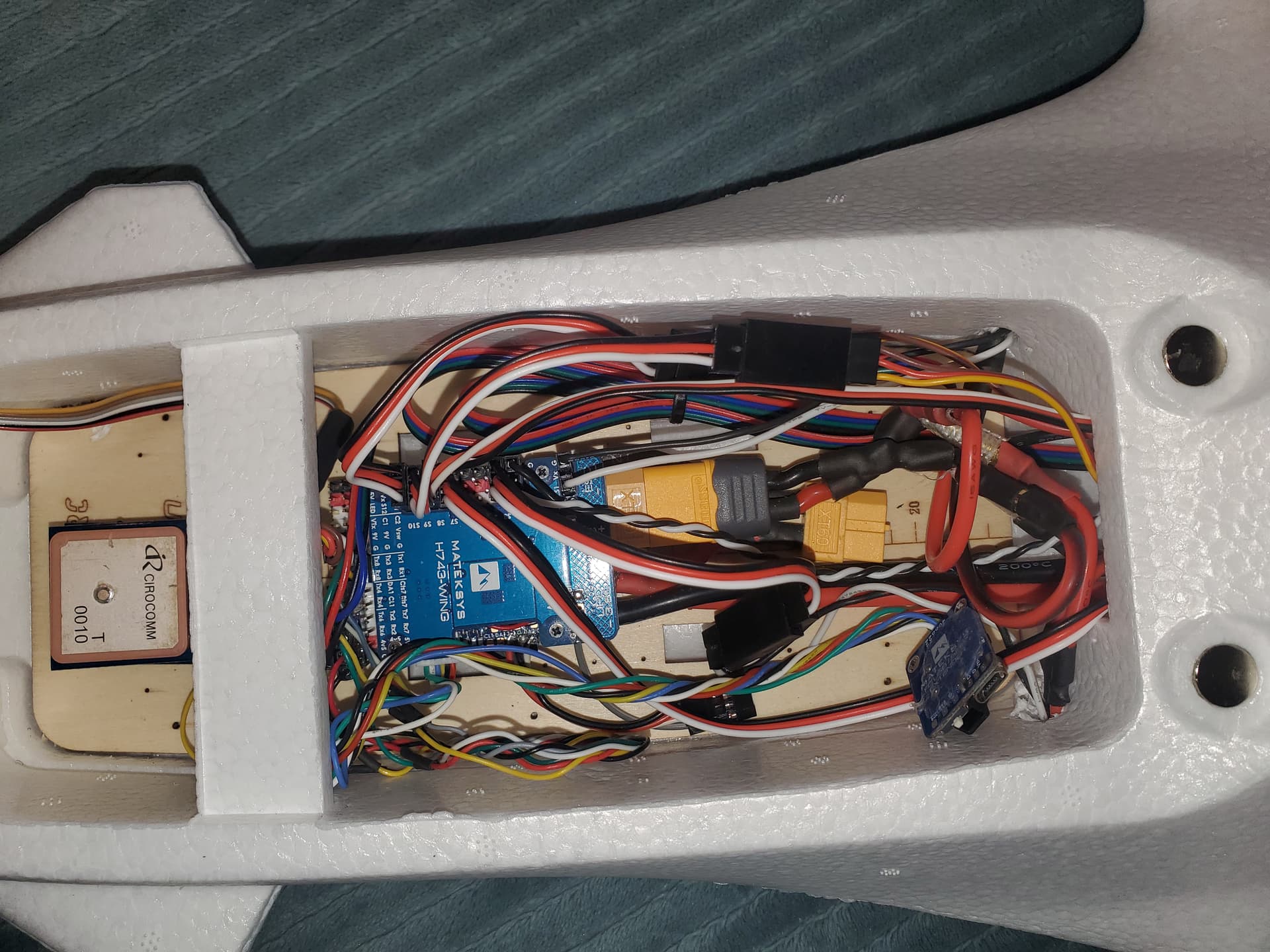
- ArduPilot flight controller with GPS/Compass. For the Tilt-Tri I used a MatekH743-Wing…for the higher weight (more on CG later) and to allow scripting for quicker initial VTOL tuning. It will be replaced with the lighter AtomRCF405-Mini in the TVBS…again primarily for weight and balance considerations.
- 3D printed PETG tilt and rear motor mounts
- CRSF RC/telemetry
Detailed Parts List
-
Motors, virtually any high quality 2205 2300KV mini-quad motor
-
4, 9g metal gear digital servos, like [url]ATOMRC S09M Metal 9g Servo
-
ESCs, 3 AtomRC 30A, like these
-
DJI Air Unit or other HD FPV camera/transmitter
-
4 Molicel/NPE INR-21700-P42A 45A 4200mAh Flat Top 21700 Battery
-
RC system of your choice. I used CRSF nano RX.
-
GemFan 6042 propellers ( out the 4 pack, 3 will be used)
-
[3D printed parts file: Dropbox - Dolphin TiltTri.zip - Simplify your life . Includes a rear cover latch that I like to use…just in case

-
Hardware for motor mounts:
- 4, 3x8x4mm 693ZZ ball bearings
- 2, 3x30mm bolts for motor hinges
- 4, 3x35mm bolts for thru wing mounting
- 6, 3mm motor mount bolts (depends on motor used)
- 18ga silicon wire for motor leads
- 3mm nylock nuts
- Ball link setup of your choice for tilt to servo connection. I used Dubro EX connectors, .072 rod, and Dubro ball links. I threaded the rod with a 2mm die to accept the ball links.
-
ArduPilot compatible flight controller, AtomRCF405NAVIWing,AtomRCF405NAVI-Mini,MatekH743-Wing, etc. Must have at least 7 outputs.
-
A GPS/Compass such as the BN880.
Build Notes







- Assembly Dolphin and enlarge the ply motor mounts cable slot to accept the 3D printer base for the rear motor mount. Press 3mm nylock nuts into it and cover with a little masking tape to prevent glue from entering the nuts. Use E6000 glue or similar to glue the mount into the rear of the Dolphin.
- Assemble the wing motor mounts and motors. Draw a line 135mm away from wing root and parallel to it to mount the tilt assembly.
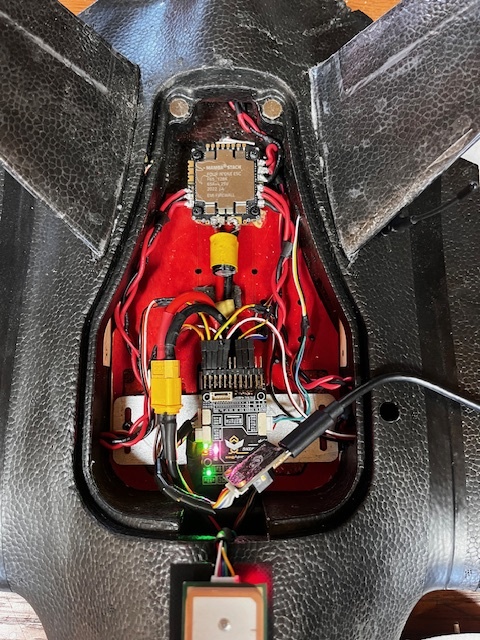
- I mounted the tail motor ESC in the through partition between front and rear compartments, using long motor leads. I mounted the two wing motor ESCS under the forward wing flare on the fuselage out of an abundance of caution for cooling while hovering. Try to make the battery leads on the ESCs as short as possible to avoid the need for additional capacitors on the ESCs.
- Arrange all the equipment before permanently attaching to assure that the final CG will be on the embossed marks under the wing. See photos for my placement. A lighter autopilot will require moving the GPS into the nose cone. Not using an HD FPV camera will require adding weight in the nose to balance.
Note: Normally you want the rear motor 2x the distance as the front motors are from the CG in order to have each motor produce the same thrust to hover level. However, its not always possible, as in this case. This configuration demands that the front motors produce more thrust than the rear in level hover. But since the overall thrust is large, its not a problem to have the front motors producing 65% of the hover thrust. This setup has a hover throttle setting of about 25% which allows it a very good rate of VTOL climb. Also since the rear motor in hover is lower current, it does not produce much heat while inside the fuselage.
Setup
Be sure to follow the wiki for RC,ACC, and compass calibrations and proper motor and servo directions.
Here is my setup parameters that differ from the defaults, after VTOL and FW tuning (with my local customization of AUX switches, IMU and compass calibrations, and OSD removed). I have left some things such as SERIAL port setups and OUTPUT functions, just as an examples. I will add comments for each as to why this value was chosen.
SERIAL2_PROTOCOL,42 #my DJI air unit is attached to this port
SERIAL7_PROTOCOL,23 crsf is attached here
SERIAL7_BAUD,115
STAB_PITCH_DOWN,5 #I like to have a lot of pitch down in FBWA when throttle is zero to allow sharp turns without stalling while gliding
FBWB_CLIMB_RATE,5 #this model has more climb power than the default
THR_FS_VALUE,995 #my TX is setup to output 950us on a switch to force failsafe
FLTMODE1,17 #just my choice of flight modes on my 6 pos TX switch: QSTAB,QHOV,QLOIT,FBWA,CRUISE,AUTOTUNE(will change to LOITER soon)
FLTMODE2,18
FLTMODE3,19
FLTMODE5,7
FLTMODE6,8
LIM_ROLL_CD,5500 #45 deg is too slow a turn for me, 55 is better
TRIM_PITCH_CD,100 #best cruise AOA
ARMING_RUDDER,2 # I want to be able to disarm from TX rudder stick
Q_ENABLE,1 # It IS a Quadplane
Q_M_THST_EXPO,0.5799999833106995 #from setup wizard in MP
Q_M_BAT_VOLT_MAX,16.399999618530273 #needed for thrust compensation
Q_M_BAT_VOLT_MIN,11.199999809265137
Q_M_THST_HOVER,0.25285804271698 #lots of power in VTOL!
Q_TRANSITION_MS,3000 #this plane accelerates quickly
Q_ASSIST_SPEED,-1 #I don’t use assist
Q_FRAME_CLASS,7 tricopter
Q_RTL_MODE,3 #I always want to do a QRTL (with FW approach and VTOL land) on any RTL (including FS)
Q_OPTIONS,1573889 #Level transitions,disarmed yaw tilts, trans_fail forces transition completion, RTL for VTOL FS
Q_TRIM_PITCH,-1 #to offset the TRIM_PITCH_CD
Q_TRANS_FAIL,5 #fail transition after 5sec if not up to estimate speed yet
Q_TILT_ENABLE,1 #it IS a Tilt-Tri
Q_TILT_MASK,3 #Motor1 and Motor2 are the fixed wing motors
Q_TILT_TYPE,2 #vectored yaw tilt
Q_TILT_YAW_ANGLE,20 yaw is 20deg of tilt range
Q_TRANS_FAIL_ACT,-1 #only report failed transition…it completes always
BATT_LOW_VOLT,12.4
BATT_CRT_VOLT,12
BATT_ARM_VOLT,11.4
BRD_ALT_CONFIG,1 #MatkeH743 needed this to make the RC uart fully functional for CRSF
RSSI_TYPE,3 rssi from CRSF
SERVO1_MIN,1000
SERVO1_MAX,2000
SERVO1_FUNCTION,33 #Motor1 (left motor)
SERVO2_MIN,1000
SERVO2_MAX,2000
SERVO2_FUNCTION,36 #Motor4 (rear)
SERVO3_MIN,1000
SERVO3_MAX,2000
SERVO3_FUNCTION,34 #Motor2 (right motor)
SERVO4_FUNCTION,0 #Cannot use these for servos …in same group as DShot above, DShot not currently used but may in future
SERVO5_FUNCTION,0
SERVO6_FUNCTION,0
SERVO7_MIN,825
SERVO7_MAX,1960
SERVO7_REVERSED,1
SERVO7_FUNCTION,75 #TiltLeft
SERVO8_MIN,1007
SERVO8_MAX,2118
SERVO8_FUNCTION,76 #TiltRight
SERVO9_MIN,1000
SERVO9_MAX,2000
SERVO9_FUNCTION,77 #ElevonLeft
SERVO10_MIN,1000
SERVO10_MAX,2000
SERVO10_REVERSED,1
SERVO10_FUNCTION,78 #ElevonRight
SERVO11_FUNCTION,0
SERVO_AUTO_TRIM,1 #always like to have my servos auto-trimmed
SERVO_BLH_AUTO,1 #automatically select Motor outputs as BLH, however currently not using…just PWM
SERVO_DSHOT_ESC,1 #for future DSHot use
RC_OPTIONS,2848 #check throttle before arming, passthrough CRSF telem for YaapuTX script, no CRSF mode message spam, CRSF LQ used instead of RSSI
FLIGHT_OPTIONS,4096 #Enable altitude control in LOITER
OSD_TYPE,5 displayport for HD Video
ARSPD_TYPE,0 #because there is no airspeed sensor
Tuning Params
Q_A_ACCEL_Y_MAX,6000
Q_A_ACCEL_R_MAX,157100
Q_A_ACCEL_P_MAX,157100
Q_A_ANG_YAW_P,3.5
Q_A_RAT_RLL_D,0.003954713232815266
Q_A_RAT_RLL_FLTT,32
Q_A_RAT_RLL_FLTD,32
Q_A_RAT_PIT_D,0.004487999714910984
Q_A_RAT_PIT_FLTT,32
Q_A_RAT_PIT_FLTD,32
Q_A_RAT_YAW_P,0.5
Q_A_RAT_YAW_I,0.05000000074505806
Q_A_RAT_YAW_D,0.019999999552965164
Q_A_RAT_YAW_FLTE,0
Q_A_RAT_YAW_FLTD,40
RLL2SRV_TCONST,0.30000001192092896
RLL2SRV_RMAX,90
RLL_RATE_P,0.05695532634854317
RLL_RATE_I,0.05695532634854317
RLL_RATE_D,0.0009505109046585858
RLL_RATE_FF,0.29361647367477417
RLL_RATE_FLTT,5.305164337158203
RLL_RATE_FLTD,32
PTCH2SRV_TCONST,0.45000001788139343
PTCH2SRV_RMAX_UP,90
PTCH2SRV_RMAX_DN,90
PTCH_RATE_P,0.16592924296855927
PTCH_RATE_I,0.5934014916419983
PTCH_RATE_D,0.0034409507643431425
PTCH_RATE_FF,0.5934014916419983
PTCH_RATE_FLTT,3.536776304244995
PTCH_RATE_FLTD,32
INS_GYRO_FILTER,64
INS_HNTCH_ENABLE,1 #your filter params will vary perhaps depending motor,but not much probably
INS_HNTCH_FREQ,88
INS_HNTCH_HMNCS,11
INS_HNTC2_ENABLE,1
INS_HNTC2_FREQ,212
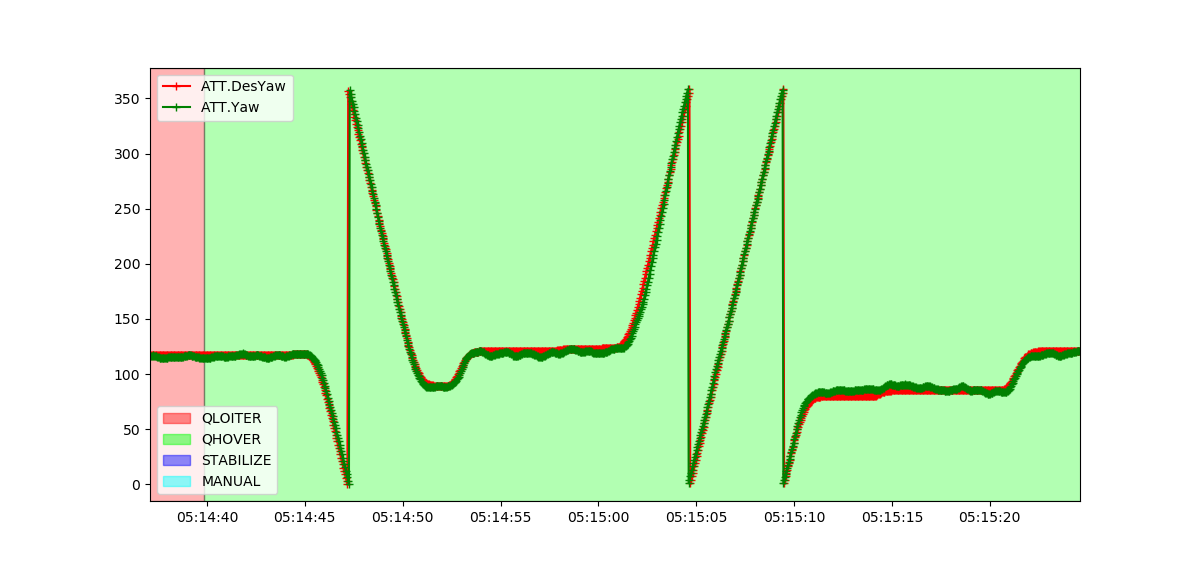
Current Status: This is a work in process… Initial.VTOL tuning is done. FW tuning is from my normal Dolphin so may change after first fixed wing flights when the current winter storm this week passes and wind is lower.
Next items:
- Fixed wing transitions and tuning
- Cruise trimming
- Videos
- Conversion to DSHot operation and tuning re-tweaks
- Changeover to TVBS
- TVBS VTOL tuning
- TVBS FW tuning
- TVBS videos
Check back over the next month