
Greetings, Ardupilot community! I’m excited to introduce you to a community-driven project that has been taking shape—the AtomRC Dolphin VTOL Conversion Kit. Born out of the collective experience within our community, this endeavor aims to transform the AtomRC Dolphin plane into a VTOL marvel, offering a seamless blend of innovation and practicality.
Introduction
Inspired by a vision of a compact, easily transportable aircraft capable of taking flight within minutes, this project focuses on the AtomRC Dolphin. We’ve drawn insights from our shared experiences, having successfully designed tilt rotor systems for aircraft like Nimbus 1800, Mini Talon, AR Wing Pro, Mini Skyhunter, and more. The firmware of choice, Arduplane version 4.4.4, forms the backbone of this project, ensuring reliable and efficient control.
Summary
- Hardware Components: Detailed list of featured components.
- 3D Printed Parts (links to free access designs).
- Arduplane Configuration Parameters
- Graphs from Log Data: Analyzing flight data for performance insights.
- Tips/Tricks: Content coming soon.
- Videos: Link to AtomRC Dolphin VTOL video by rortega.
- Acknowledgements: Gratitude to the Ardupilot community for support.
- Content Updates: Upcoming detailed insights and community collaboration.
Hardware Components
The components featured in the project include:
Configuration 1 (rortega - Grey Dolphin)
- Motors: 3 x Emax Eco II 2306 2400kv
- ESCs: 3 x Emax Formula-32 45A BLHeli_32
- Propellers: 3 x APC 6x4 E
- Servos (Tilt): 3 x Digital Servo MG92B Metal Gear (13.8g 3.5KG, 90 degrees)
- Servos (Ailerons): 2 x Digital Servo Tower Pro MG90S 9g Metal Gear
- Flight Controller: SpeedyBee F405 Wing (Arduplane v4.4.4)
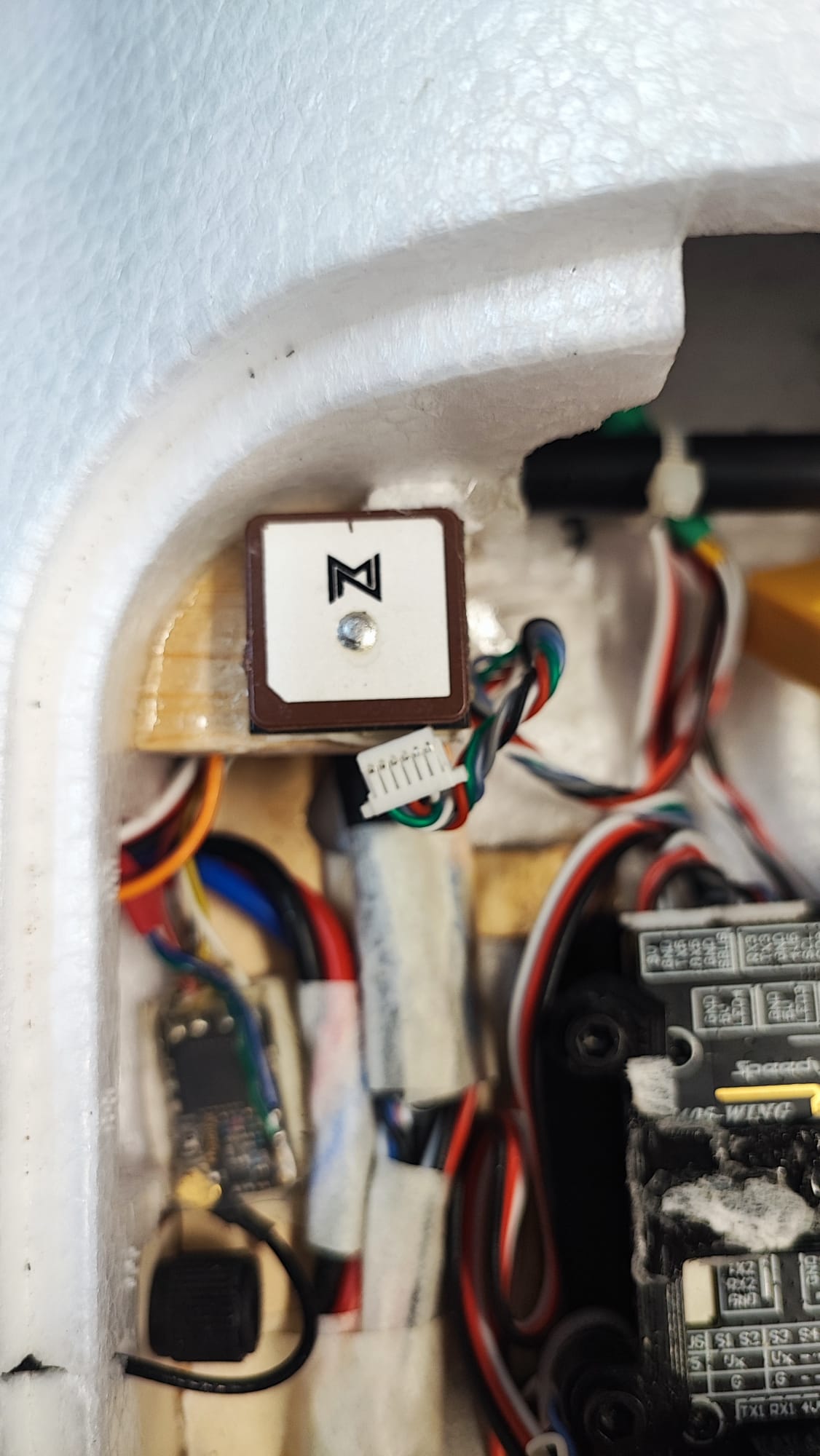
- GPS Module: Walksnail-WS-M181 GPS (M10 GGNS) + QMC5883 compass
- Radio System: Radiomaster TX16S + HappyModel ES900TX/RX 868Mhz- (ExpressLRS 3.x)
- Video: DJI FPV Goggles V2 + Runcam Link Whasp
- Battery: Li-ion 4S1P 21700 4200 mAh
Configuration 2 (Jose’s Variation - White Dolphin)
- Motors: 3 x Emax RS2205 2300KV
- ESC: LANNRC-CONTROLADOR DE VELOCIDAD Lipo 4 en 1 compatible con BLHeli S/ DSHOT600, 30A 2 ~ 6S
- Propellers: 3 x APC 6x4 E
- Servos (Tilt): 2 x Digital Servo DS-939MG Metal (12.5 g, Torque 2.5 kg)
- Servos (Ailerons): 2 x Digital Servo DS-939MG Metal (12.5 g, Torque 2.5 kg)
- Flight Controller: SpeedyBee F405 Wing (Arduplane v4.4.4)
- GPS Module: Walksnail WS-M181 GPS
- Radio System: Radiomaster TX16S + TBS Crossfire
- Video: DJI FPV Goggles V2 + Runcam Link Whasp
- Battery: Li-ion 4S1P 21700 4200 mAh, Li-ion 4S 2P 18650 6000 mAh
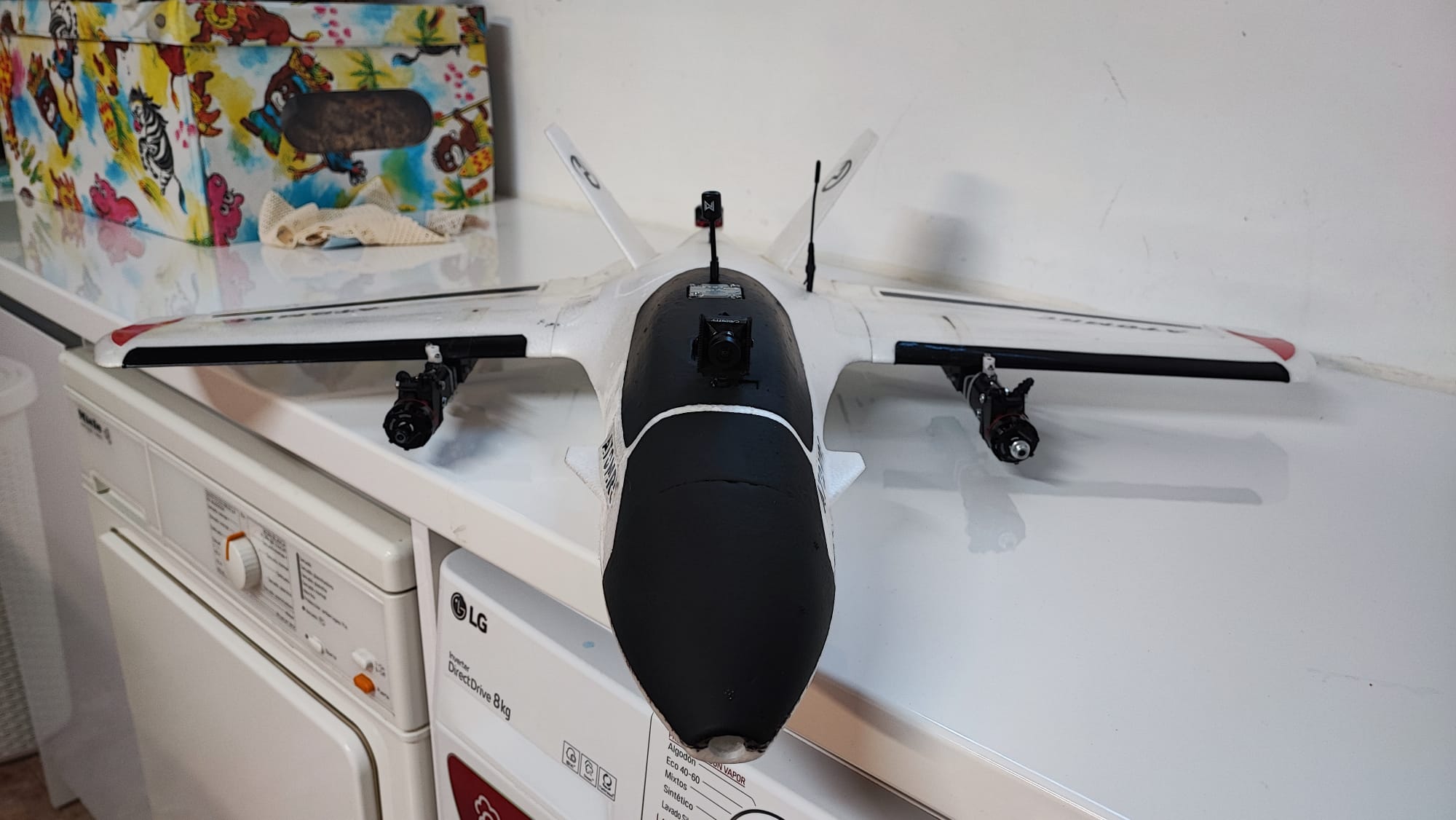
These configurations provide diverse options for the AtomRC Dolphin VTOL, showcasing variations in motors, ESCs, and other key components to cater to the preferences and needs of the community. Rortega configuration corresponds to the grey Dolphin variant featured in the starting picture.
Stay tuned for insights into each component and its role in creating this innovative VTOL conversion. Additionally, we’ll be featuring alternative configurations from fellow community members who have successfully implemented the same tilt rotor system.
3D Printed Parts
For the 3D printed parts used in this project, you can find the files on Thingiverse:
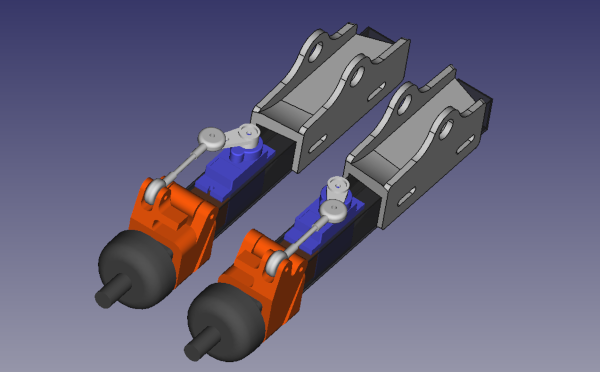
- [VTOL parts] (AtomRC Dolphin VTOL Conversion Kit by raulya - Thingiverse)
- [Flight controller and electronics)() Link comming soon.
- Video TX and Pan Servo Link comming soon.
- Canopy latch
- Caddx, Nebula Pro, and pan servo support

Other parts
- Fuselage motor mount part is motormount_1.stl from thing atomrc dolphin set by ifgesha - Thingiverse
- The connecting screw of the tilt system parts is M2, length 28 mm.
- The screw to connect the servo link ball joint is M2, length 14 mm.
- The screws securing the motors to the supports are M3.
- The carbon tube has a section of 15mm x 15mm and a length of 15cm.
- The wing support part screws are M3, 26 mm length.
Soon, we’ll be adding more links to other parts of the aircraft, such as the controller and electronics tray, video transmitter and pan servo mounts, as well as the rear and front canopy latches.
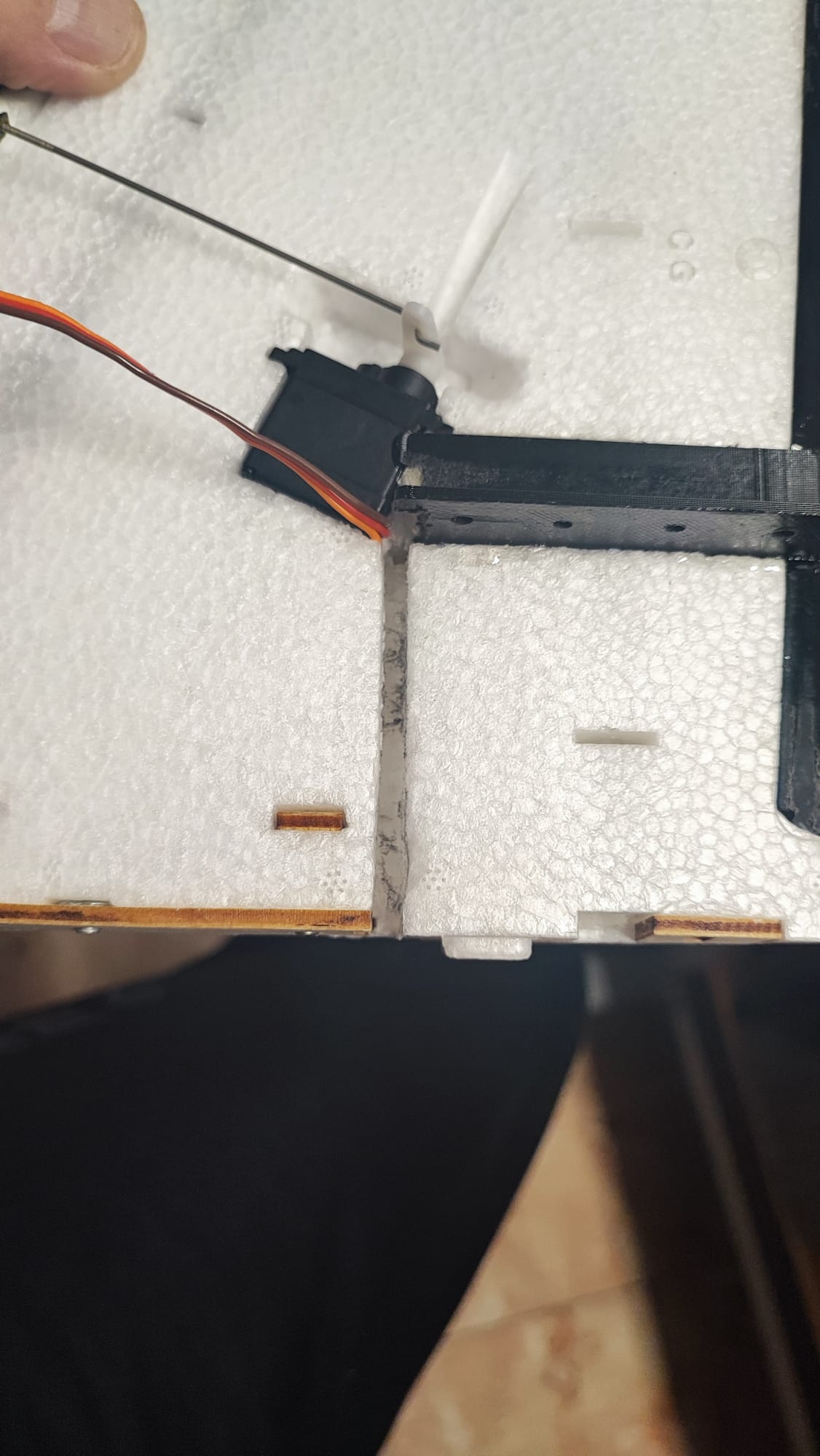
Assembly Details
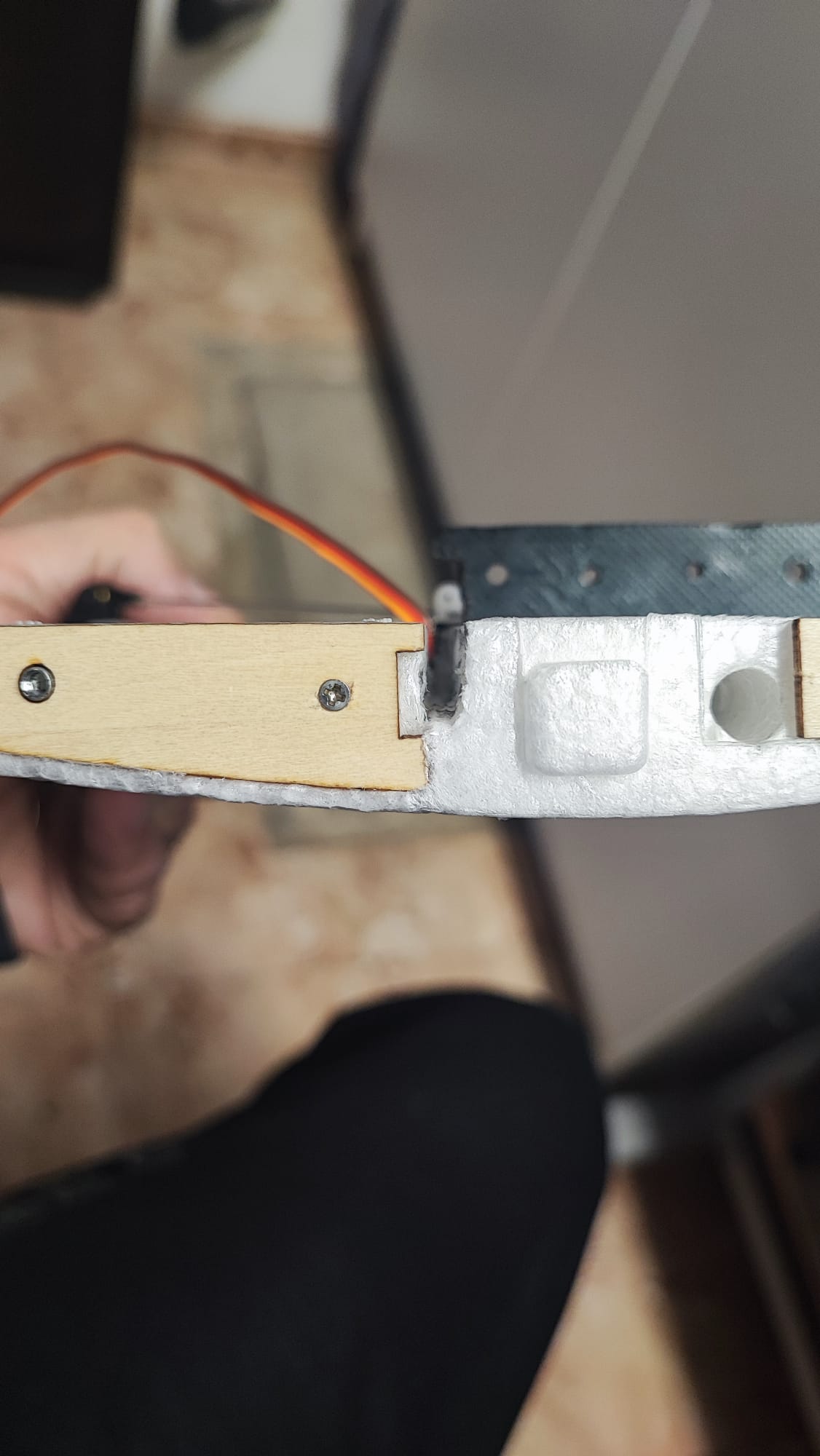
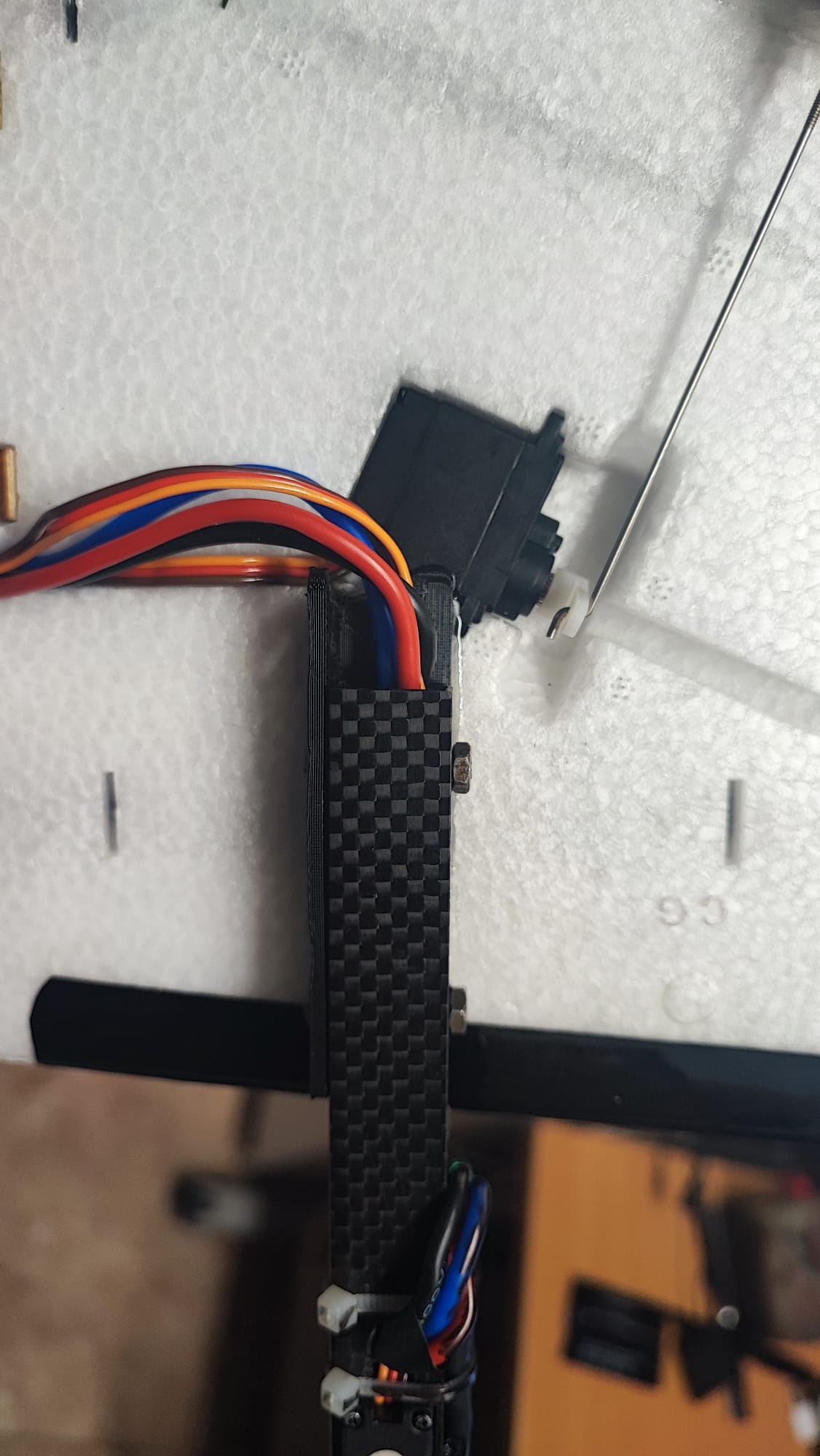
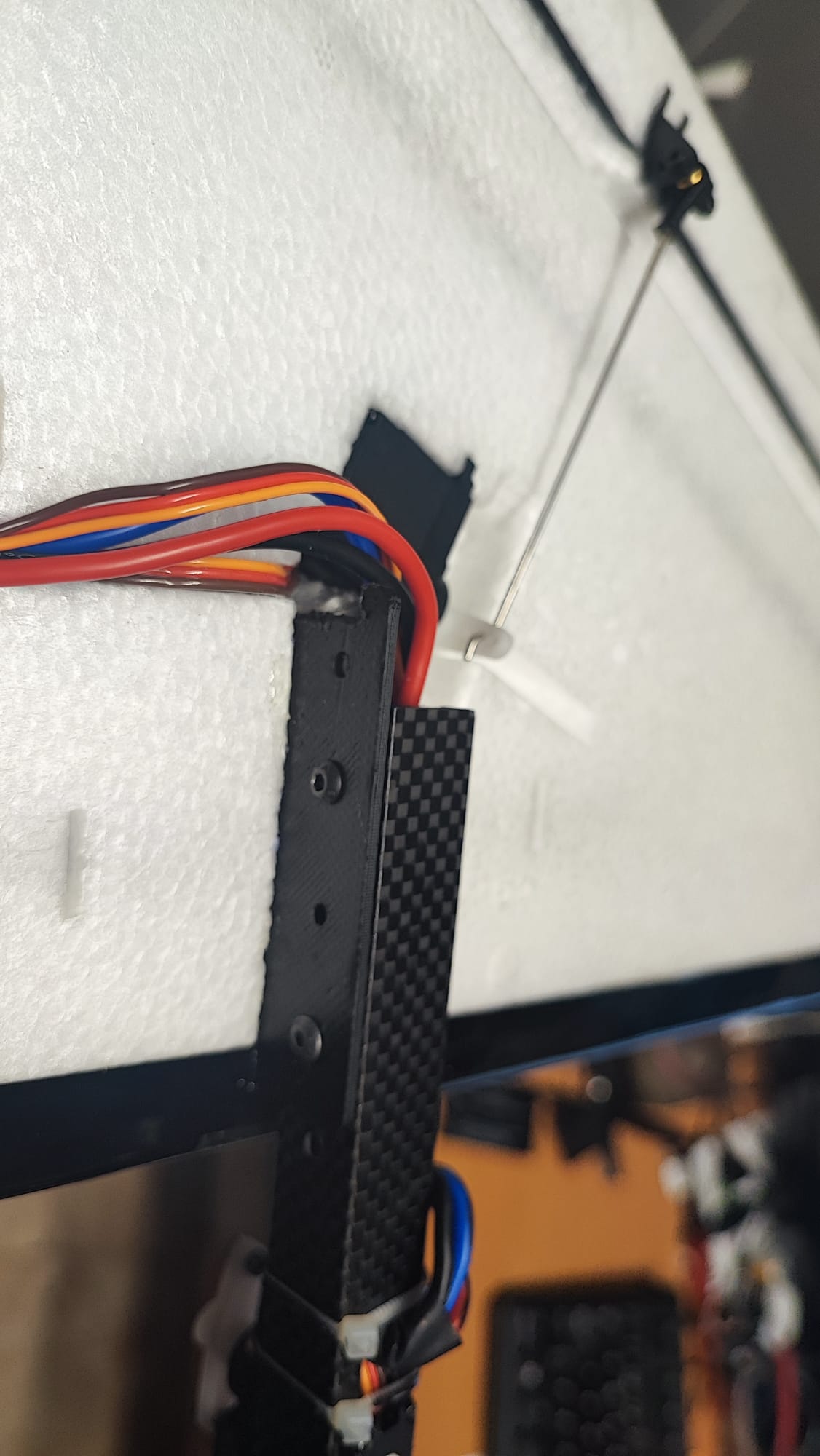
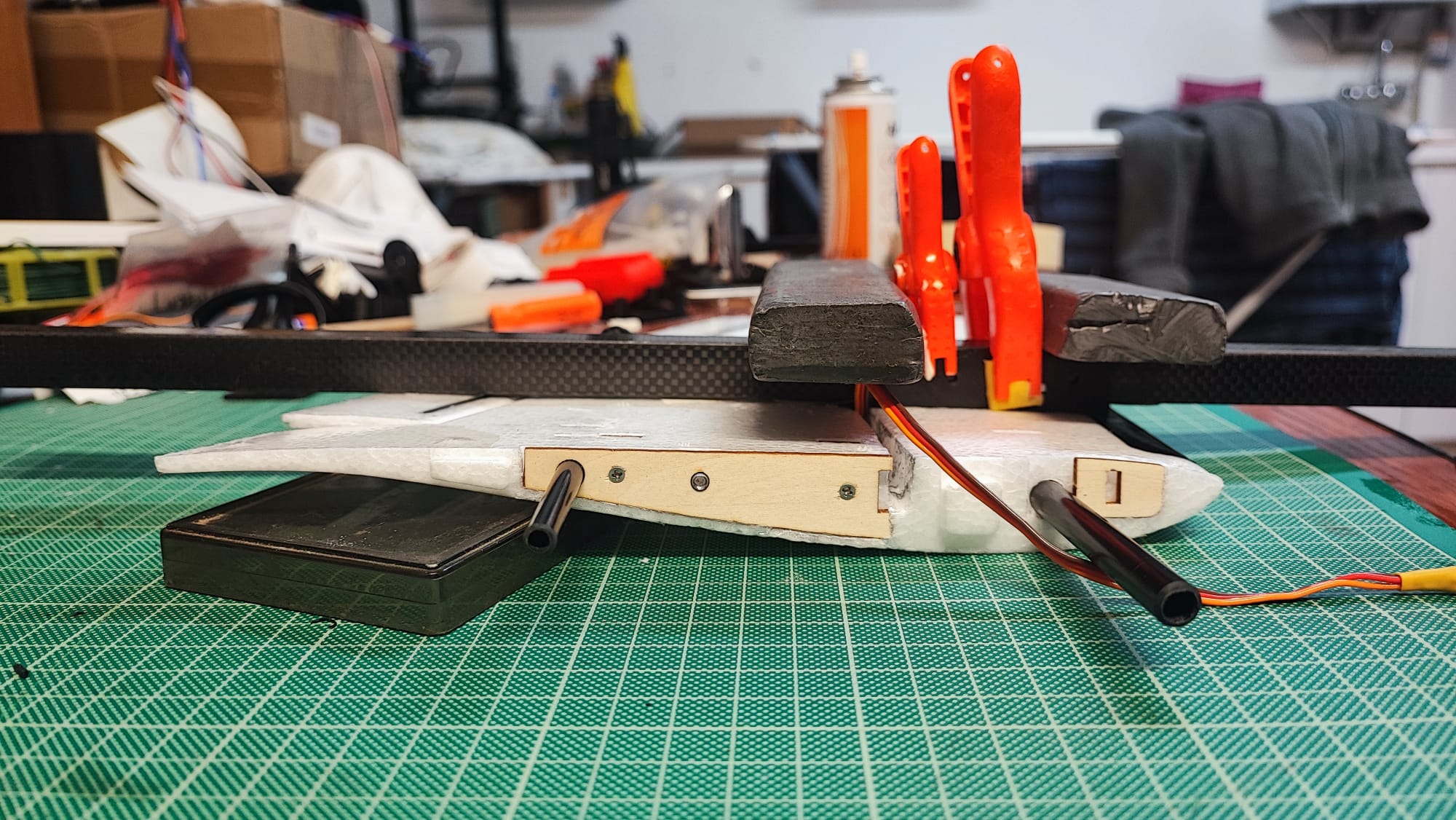
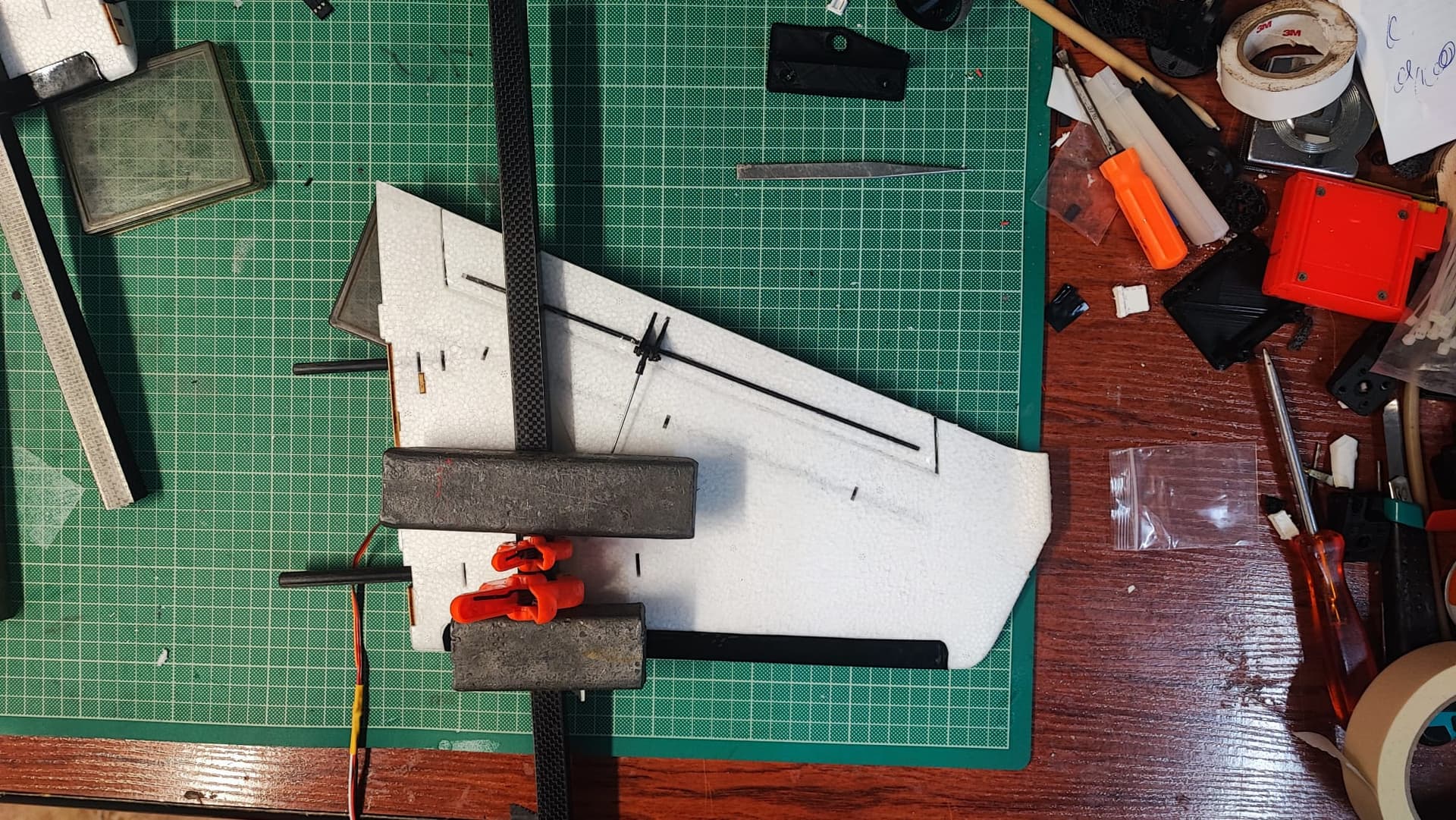
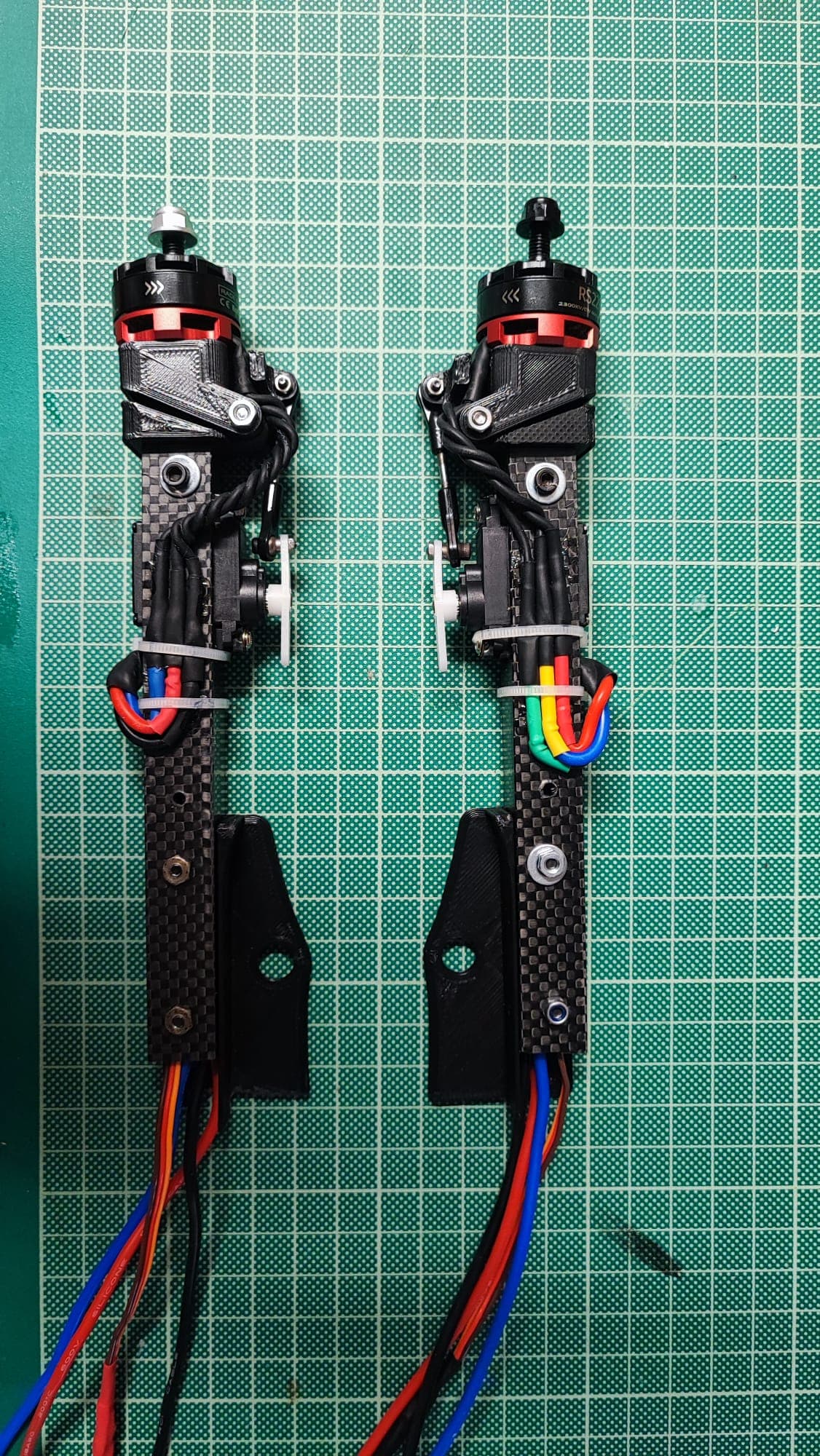
In this section, we provide assembly details specific to Jose’s configuration. For visual reference, here are a couple of photos of Jose’s aircraft:


For more detailed images of the assembly process, please visit this post to explore additional photos.
Arduplane Configuration Parameters
Content Coming Soon
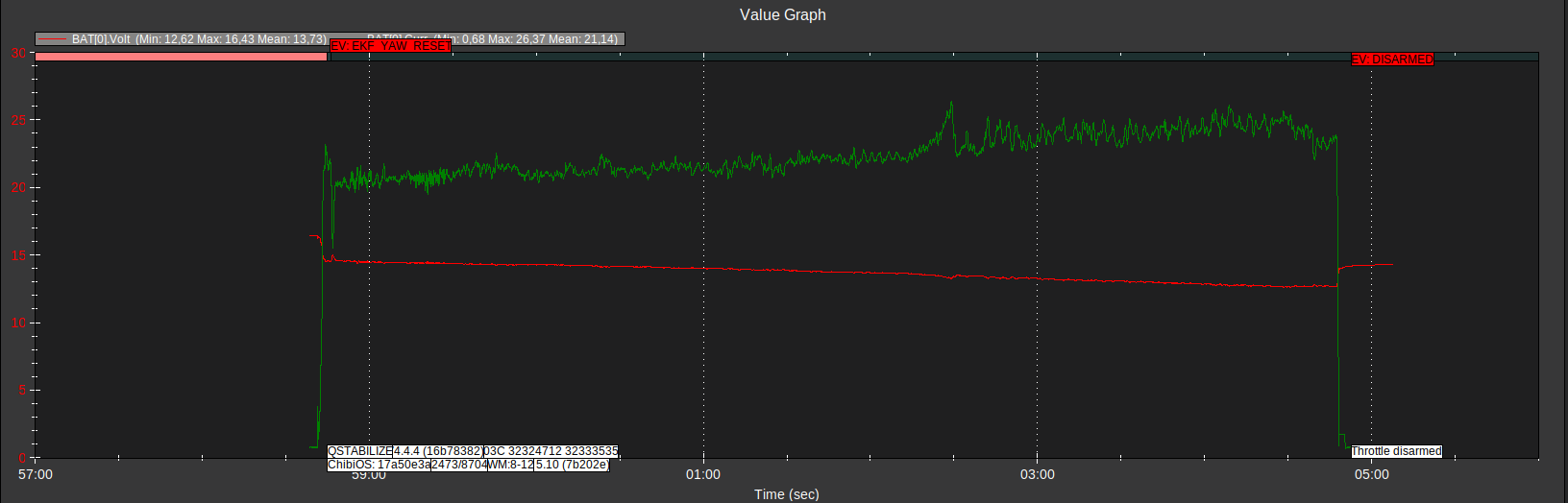
Graphs from Log Data
One of the exciting aspects of this VTOL conversion is the wealth of data logged during flights. We’ll be sharing detailed graphs and analyses derived from these logs, providing valuable insights into the performance and behavior of the AtomRC Dolphin with the VTOL conversion kit. Stay tuned for a deeper dive into the data that enhances our understanding of this innovative project.
Tips/Tricks
Content Coming Soon
Videos
AtomRC Dolphin VTOL by, rortega
Li-ion 18650 4s 2p batery pack test, by Jose
42 minutes flight with Li-ion 21700 4S1P pack, by rortega
Acknowledgements
A special thanks to the Ardupilot community for its continuous support and collaborative spirit. This project wouldn’t be possible without the shared expertise, insights, and dedication of our fellow enthusiasts. Your contributions make the journey even more rewarding. Together, we soar to new heights!
Content Coming Soon
Stay tuned as we delve into each aspect of this project, shedding light on the hardware components, 3D printed parts, Arduplane configuration parameters, and valuable tips and tricks. This is a project by the community, for the community, showcasing the power of collaborative innovation. Join us on this VTOL journey with the AtomRC Dolphin—let’s take flight together!










")
")