I use hawk2 as ardupilot, the firmware is AC3.4.3.
When the ardupilot at poshold mode, it should be loiter in a postion, but the hex wander in x direction slowly. I suspect the ekf para is not good for the ardupilot. Anyone can help me, thank you.
Without a log it’s hard for anyone to help. Please upload one log with this issue so someone can look at it.
the log is stored in goolge drive
https://drive.google.com/file/d/0B-yow-BUVec6N2ZnU0pVdmdERWM/view?usp=sharing
Check your radio trims, it appears you have some trim dialled in to your roll axis.
I have checked the radio setting, the radio is futuba 14sg. The trim is ok. I think it is not the problem of radio.
I verified your log and it seems that your rc1 trim is the very same value as your ch1 input, so unless I missed something, it doesn’t seems to be the trims. You could check it by using the brake mode and see if the drone wanders.
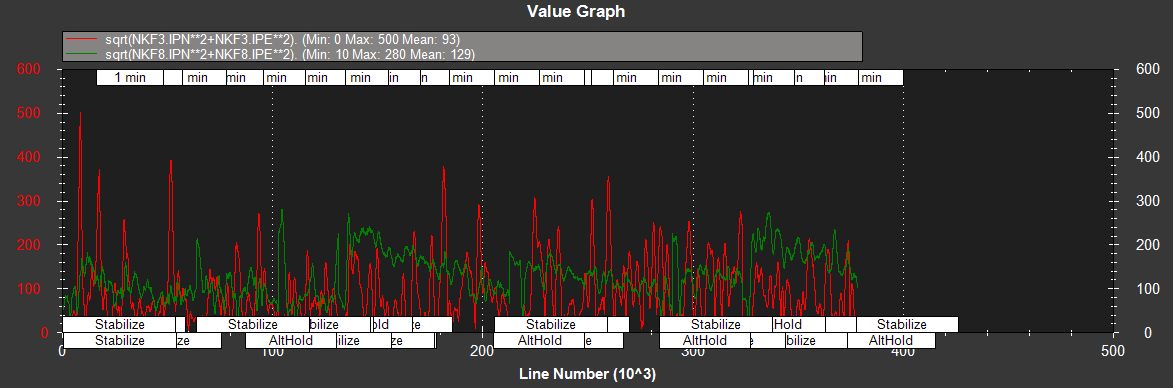
Check your vibration levels because they are pretty high and it could confuse ekf2 system. Could it be the reason why your position innovations are so high:
I will change the GPS module firstly, the GPS module is ublox-M8N. The antenna is covered by a hat of carbon fiber. Maybe gps is interfaced by the hat. Then i will change the installation of hawk to decrease the vibration. Thank you again.
You’re welcome! Try that and see if it helps!
Think of carbon fiber as a sheet of steel. Sort of.
Carbon fiber is a good conductor and thus it can block RF signals. Remove it an you will see it improving
Listen to Jesus (always wanted to say that 
Having a CF hat? above the GPS antenna is very bad design - it will massively attenuate any GPS signals. Its a wonder it works at all. your GPS patch antenna needs clear view of the sky and if possible from horizon to horizon too.
i change the EK2_GPS_TYPE para from 0 to 3,
This controls use of GPS measurements : 0 = use 3D velocity & 2D position, 1 = use 2D velocity and 2D position, 2 = use 2D position, 3 = Inhibit GPS use - this can be useful when flying with an optical flow sensor in an environment where GPS quality is poor and subject to large multipath errors.
when i change the para back to 0, the wander is decrease. maybe it is the reason. As the rainy day, i will test the hex another day.