There are two things I am try to achieve
1.turn on a Switch → Arm my rover
2. Switch to get it out of Auto mode to manual mode . flick it back to
RCx_OPTION, x being whatever switch(s) channels you assigned in your Transmitter. Arm/Disarm is 153 and Manual Mode is 51. Not much to it.
1 Like
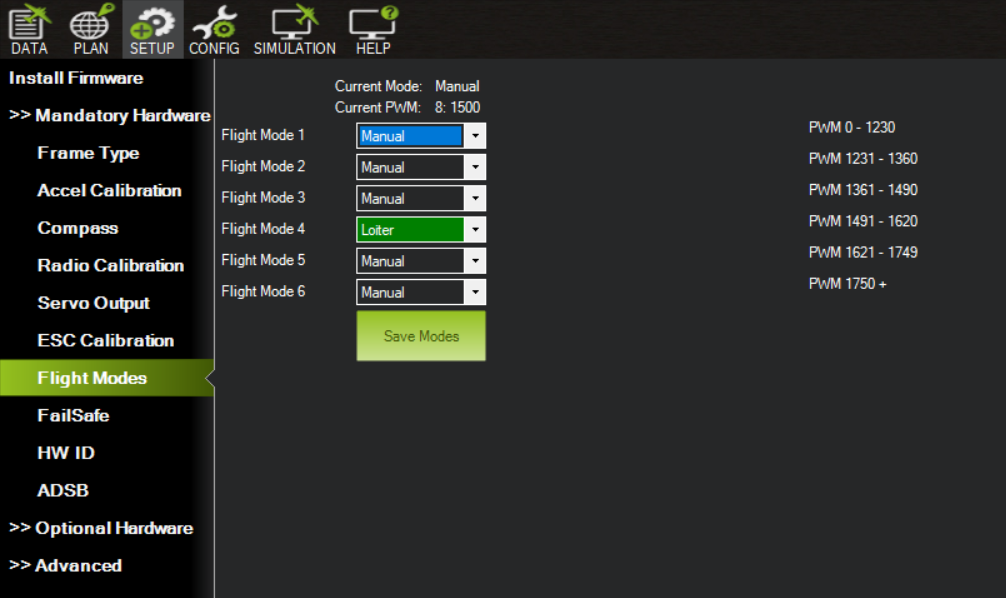
where do I find all this ? If you don’t mind me asking .All I see is the picture below but do not see what switch or channel it linked to and when I flick all the switches on my radio nothing happens . Thanks
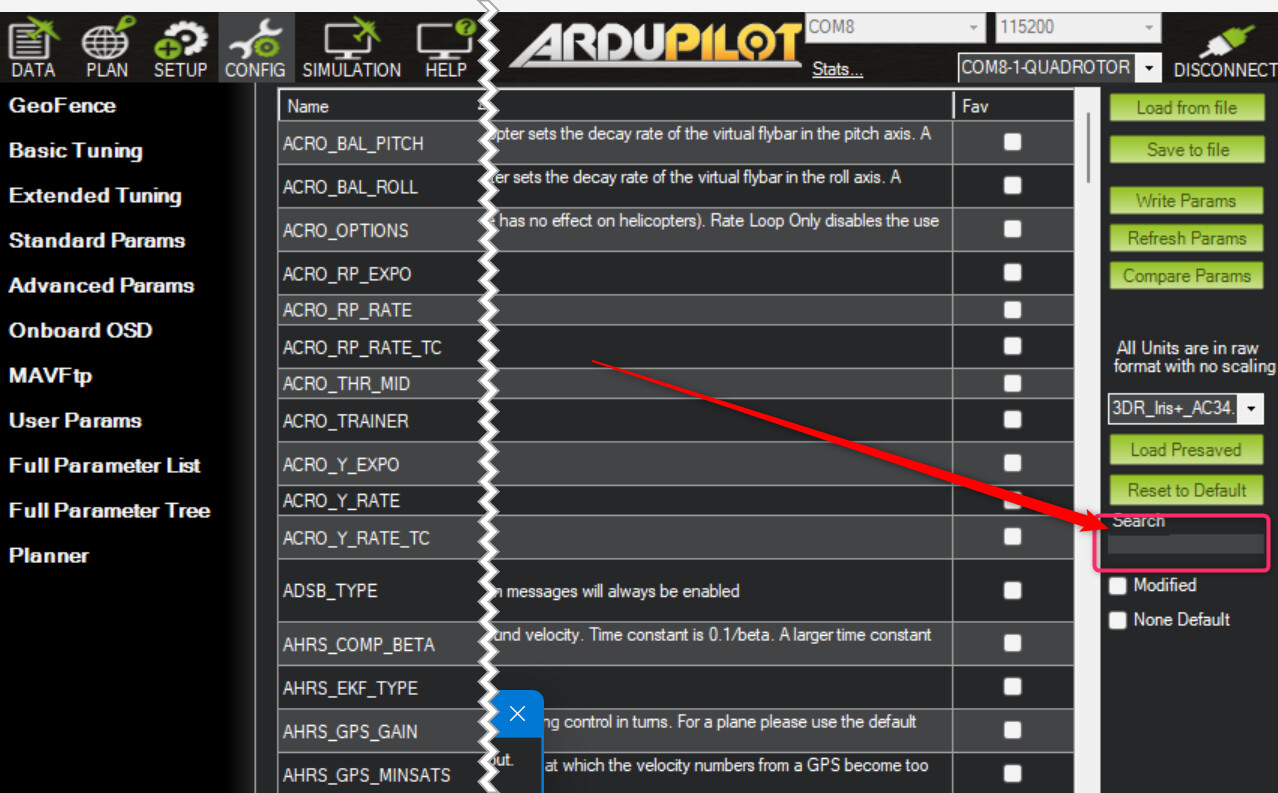
You need to go to “Full Parameter List” under “CONFIG” and find the Parameter need to change by using the search box; see image below.
Enter the parameter value you want to change and make sure you hit the “Write Params” button on the top right corner.
1 Like
works like a charm .Thanks
2 Likes
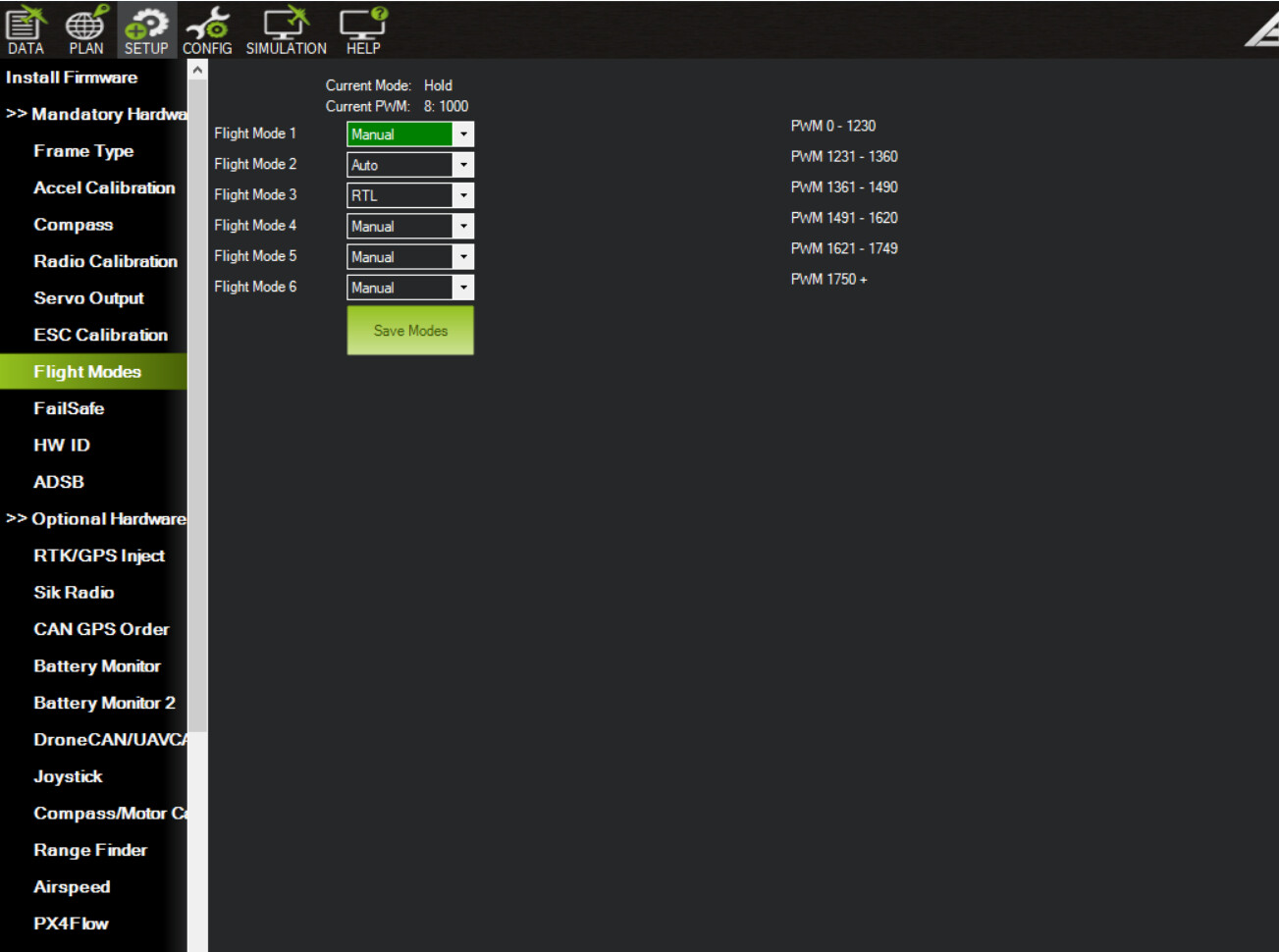
please hear me out here - below is the option I have set up in the flight mode
when I flick my RC switch the SWD tied to rc 6 the unit goes into manual mode as expected but then flick it off it naturally reverts to loiter mode and all this happens on Flight mode 4 how .
My question is how do I it to go from manual mode to returning to a mission (Auto) . Thanks
So configure a channel for Auto Mode. I don’t understand what you are asking.
This part works too . Thanks once again for the help .
I have changed RC6_Option to 153 and configured Channel 6 to switch G on my Jumper T12. After pressing the safety switch, when I flick Switch G, my copter does not arm (using the rudder arms my quadcopter). I am attaching my parameters file. What am I missing please?
My Config - Pixhawk 2.4.8
Ardupilot 4.0.7 (0bb18a15), MP 1.3.80 build 1.3.8479.20539
Aug122023_bkup.param (18.0 KB)
The ArmDisarm option is 41 for 4.1 and lower. Recommend you update to Rover 4.2.3.
1 Like
Hi Yuri,
Thanks very kindly. That corrected the issue! And I will be updating to latest Quad version as I am currently working on Quads, may be someday Rovers ![]() I am planning to test the lastest verio on the bench first. Thanks so much for your suggestion and empowerment
I am planning to test the lastest verio on the bench first. Thanks so much for your suggestion and empowerment ![]()
Hello! I have set my RC8 to 153 but nothing happens when I flip switch. I Can only arm via mission planner clicking ARM. I have disabled all arming checks since working now on bench with this. I also tried ARM / emergency stop option but that is not working either.