There is not enough logging parameters enabled to determine anything. What you are describing for arming makes no sense. Perhaps you have a Mode 1 Transmitter setup, or the channel doesn’t match Arducopter.
No the mode is set to mode 2
Left stick to for throttle nand Yaw and right for pitch and roll.
And after yesterday’s crashes I reset the APM to defaults and started calibrating afresh…but but I can’t arm it using sequence… Only through mission planner
Is there any way I can pull the parameters file and you could have w look?
The life’s I uploaded think had a parameter file as well dunno if it’s what I mean…
Or if you could Lemme know your convenient time, I could share my screen for you to have a look??!
Also you say not enough logging parameters enabled…
So could you Lemme know where I could enable to see if I could do another fight (hopefully without breaking anything) so that I can share the log to you?
Hi Dave,
Lot search and I found this parameter file which said works perfect for APM 2.8…
And after writing this to the APM, it arms properly…i.e the left stick pushed to right corner, it arms…
However before taking of kinda flips to the right…
I recalibrated the escs as well…
If I counter the roll lil or trim it , it can take off but fight is uncontrollable and crashes…
If you could Lemme know how I can pull/ enable all parameters logging, I’ll try to fly it again and share you the bin file!
Attaching the parameter file… I just did an accel and radio calibration after using this file
39515201_1162699340534495_7365705497724321792_o|406x500 a450 PLAS 1704.param (5.0 KB)
Run the Motor Test function in Mission Planner to determine if the motor order and direction are correct. Setup>optional hardware>motor test. Read the note and click the link to understand the order the test is run in.
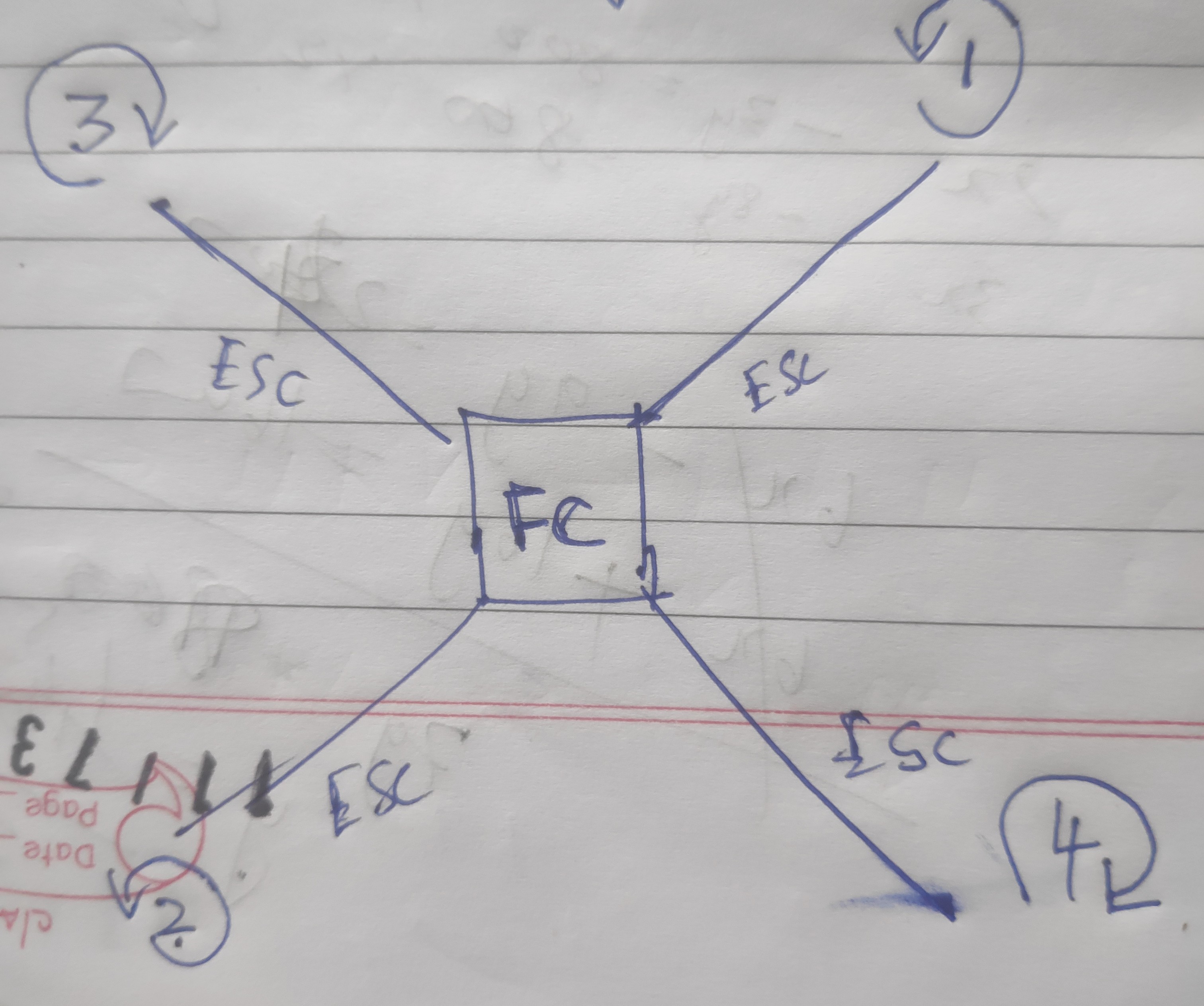
This is my motor layout.
Tested and is correct
{kind=link}
Also please temme how to make it log all the parameters you were looking for earlier.
Another doubt, I can’t seem to take off in simulation mode…the drone stays on the same place on the map in mission planner
Could you shed some light on this
Appreciate your patience with my noob questions