Ok, so actually it seems I really do not have much of a linear throttle. The motors dont seem to increase in RPM very much from low stick. The THR_MAX is 900, MID 380, MIN 100, TRIM_THR 200. I also have the MOT_SPIN_ARMED set at a value of 1 but the motors do not spin upon arming.
I noticed within the ESC Calibration field there is a section related to setting MAX, MIN, LOW throttle values but the boxes to do this do not light up and wont let me into those fields to change the values. How do I set the throttle settings to run from low to higher RPM?
Disregard my message above, I figured it out after reading into your message slightly more. This is the first APM I have had so many issues with. I guess its all about how they get to you and what parameters are already preset. Setting up an airplane within APM is slightly easier to do in my opinion.
My next investment will be a Pixhawk. Do they set up the same as the APM boards or are they a little more user friendly?
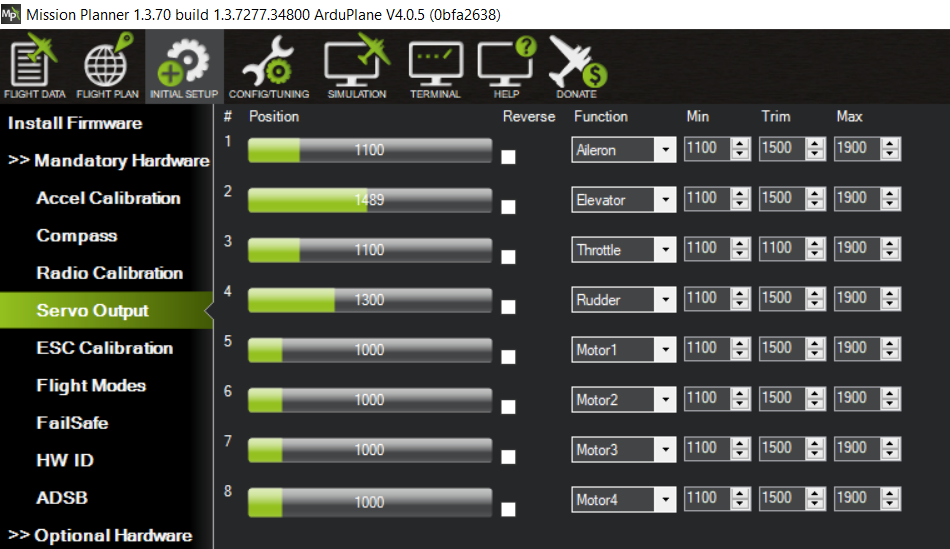
The THR parameters are not the servo output settings and further those settings don’t even exist in the level of Arducopter firmware he is using. This is what he will see from the Servo Output screen:
Hey guys, hope everyone is doing well. I thought I was ready for spooling it up and see what happens as far as a first flight. When it got light on the skids it wanted to come backwards quite quickly so I shut it down…skids grabbed in the grass and it halfway toppled over…no damage.
I’ve checked the rotation of motors and made sure I have the right props on the right motors. Everything checked out fine.
Can anyone offer some advice as to what I should check? Thanks!
Were you giving it pitch input to attempt to counteract this? If so reverse the pitch channel (2) in your transmitter. This is common. Otherwise don’t baby it on Takeoff. Give it a burst of throttle to get it off the ground.
Yes, I was giving it forward elevator stick to counteract its tendency to want to walk backwards towards me. And yes I was babying it just to see what it was going to do. It checks out fine on the RC Input checks and the movement is in the correct directions. Should I still reverse it like you mention? Even if it still checked out like it should within Mission Planner?
Yes, reverse pitch on your transmitter and give it another go. But just to besure. Your Transmitter trim sliders are at center when you did the Radio Calibration (and never change them) and you have done a proper accelerometer calibration?
OK, so i did another accelerometer calibration and gave it a try. I do not have motors start on arming even though I gave is a value slightly above minimum throttle. Not a big deal but I would like to have motors run when armed so its consistent with my other F550 with a Naza sysem.
So when I gave it a go this time at low throttle it wanted to do the same thing again however you mentioned to bump it into the air and not mess around on the ground. When I did this the F450 did go straight up I was able to slightly control it and it was responding and flying one spot. The real problem I am having is my throttle is not linear. It seems to have full throttle at half throttle with no change in rpm after half throttle.
I want the throttle to be smooth from zero stick to full stick…how do I achieve that?
You must be in an Altitude Hold mode (AltHold, Loiter, PosHold) for it to perform that way (as it should). Mid throttle is Hover position in those modes Takeoff in Stabilize mode and once it’s a few feet off the ground switch to an assisted mode if you want. Just realize that you have full control of the throttle it will only stabilize attitude not altitude or position.
I am in stabilize mode, that is what I have set currently on all 3 positions just in case I was to bump it I didn’t want to go into some mode I wasn’t ready for.
As for the throttle stick currently its dangerous to fly as I go from low stick to mid stick I seem to get all the power at once, there is no low range mid range or full throttle. As soon as I move the stick it just goes to a high throttle position.
THR_MAX is 1950
THR_MID is 450
THR_ MIN is 100
Is this acceptable? Do I need to look at another setting that causes the throttle increments to move slower? Like when I move the stick to full throttle it moves through those increments I have set at a slower pace and I don’t get full throttle all at once?
No those are not right. Perhaps you should set all to default and start over. That’s what I would do.From the Full Parameter List press the button that says “Reset to Default”. Then configure everything and re-do all calibrations.
Better yet, get rid of that obsolete flight controller and replace it with one that runs current Arducopter.
Ok, i will just reset it and start over then. I am kinda stuck with the APM right now. Hobby money is tight at the moment to order a Pixhawk or similiar.
Hi Dave!
I see your proficiency and I’m amazed.
I’ve spent my hard earned money and it pains me to see my quad crash again n again and I’m breaking props…
The thing is I can’t control it at all in alt hold mode… Guess very high or comes very low on reducing lil throttle…
Stabilize mode isn’t helping much as well…
Very difficult to control in air and I can’t land it properly at all.
Please help!
Tried everything… Esc calibration, opening up APM and placing the sponge on the barometer…
I also saw in 1 of your comments to reverse a channel…
I mean even I use a lil bit of roll or pitch depending on the way the quad is trying to flip to counteract and take off and it’s all doomsday later
Hi Dave!
Many thanks for the quick response!
Attaching the recent logs available in the FC .
Also I wanted to add that arming of my quad was strange… Need to push left stick to bottom left and right to bottom right. The opp was to disarm (left to bottom right and right to bottom left) . I broke my head a lot to even figure this out by trial and error as all the instructions available online said apm would arm if we just pushed the left stick to bottom right corner.
That apart I tried resetting the APM and started fresh calibration of escs, and fresh setup of APM today
Still the drone wasn’t flyable in both alt hold and stabilize. Crashed and broke another prop coming down to my final set before I buy them again
The last log is of this recent exp (probably the logs 39 to 40)