I’ve been following this tutorial to communicate with Raspberry-Pi via mavlink: Communicating with Raspberry Pi via MAVLink — Dev documentation
It’s confusing because I cannot changed to stabilize mode since it is unknown.
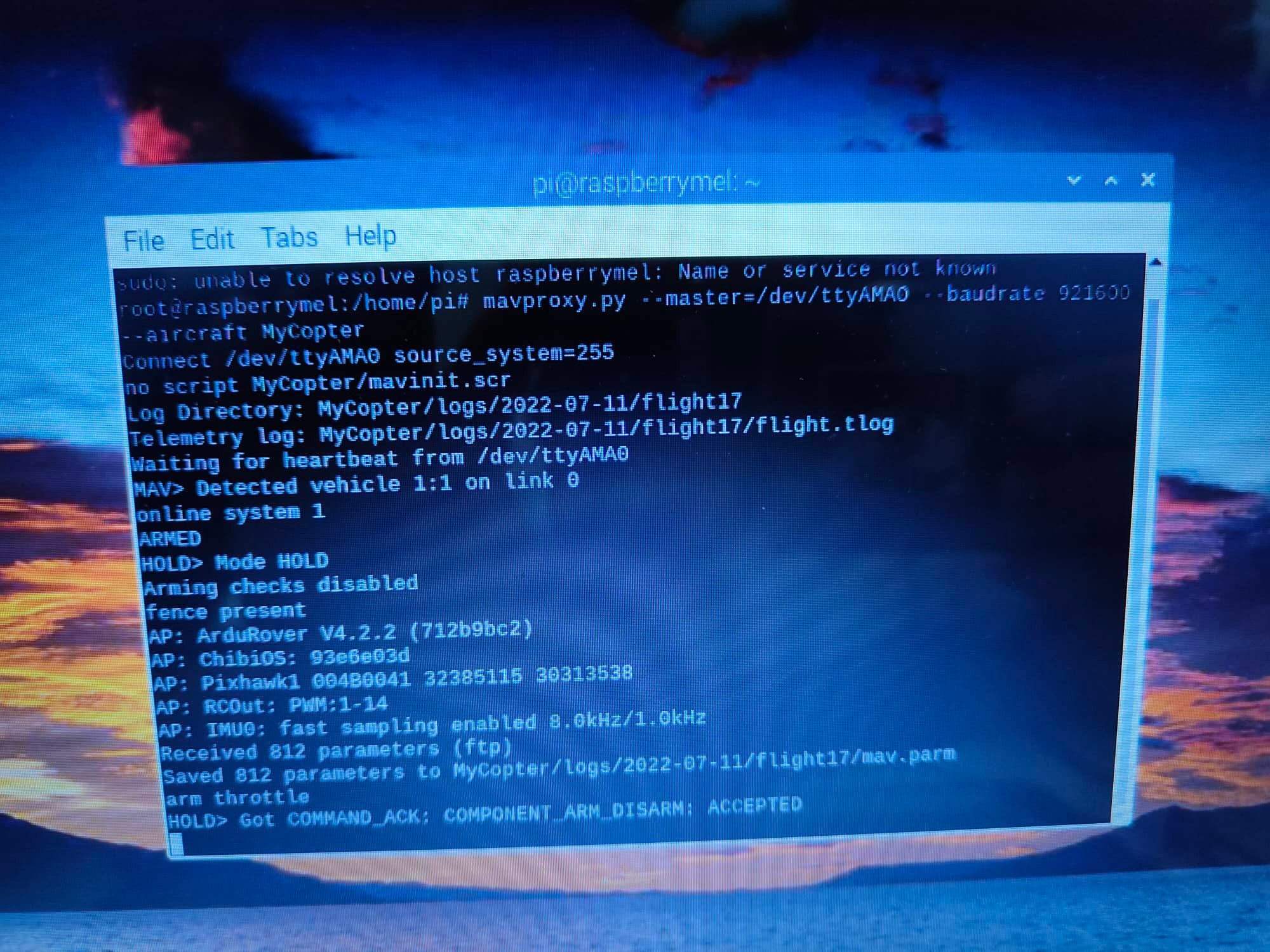
And when I tried doing arm throttle command after mavproxy, it only says
Got COMMAND_ACK: COMPONENT_ARM_DISARM: ACCEPTED
It doesn’t show that same message of APM: Ground Start.
I don’t really know what arm throttle is supposed to do but is it supposed to move the wheels of my robot? Thanks
Here’s the picture: