To be more specific about what I want to do.
I have pictures to do at regular intervals, in a totally secure place.
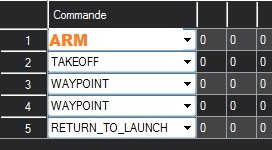
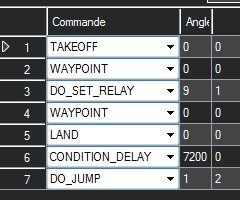
I would have liked to launch myself a first automatic flight then, the multirotor makes two other identical flights to two hours apart, with this type of commands, it would allow the drone to be disarmed when it is on the ground:
I think I can accomplish this mission with “MOT_SPIN_ARMED = 0” and the commands below, but what bothers me is that the multirotor remains armed between each flight.
Another issue besides staying armed is that with MOT_SPIN_ARMED at zero the flight controller might under certain conditions (e.g. a combination of weight imbalance, strong wind and low takeoffweight in relation to motor power) reach low end saturation on some motors. With normal MOT_SPIN_ARMED at a level that keeps the props rotating that is not ideal but usually leads only to minor inbalance and attitude control issues, but if the props actually stop spinning completely in such a condition you might get into more issues (desync or serious attitude control issues) as the motor is not able to spin up again fast enough when suddenly needed.
Why not put a companion computer onboard and fly in guided mode, via a script. A Raspberry Pi Zero will do it just fine.
(I assume you won’t have MP connection all the time.
There will be scripting support in the FC, but it is still at the beginning of the development.