I had issue on Arkflow, Initially the quad is flying smoothly and hover perfectly. However after i continuous develop, it started to drift and hard to control. I had done the calibration but it still having issue. I tried change to Microair MTF-01 and the quad able fly smoothly again.
I see you have four different rangefinders in the log. If you remove the other three rangefinders and use only the one on the ARK Flow, does it hold position?
What if you use position hold instead of flow hold? As I understand, flow hold doesn’t use the distance sensor for calculating velocity from the optical flow data.
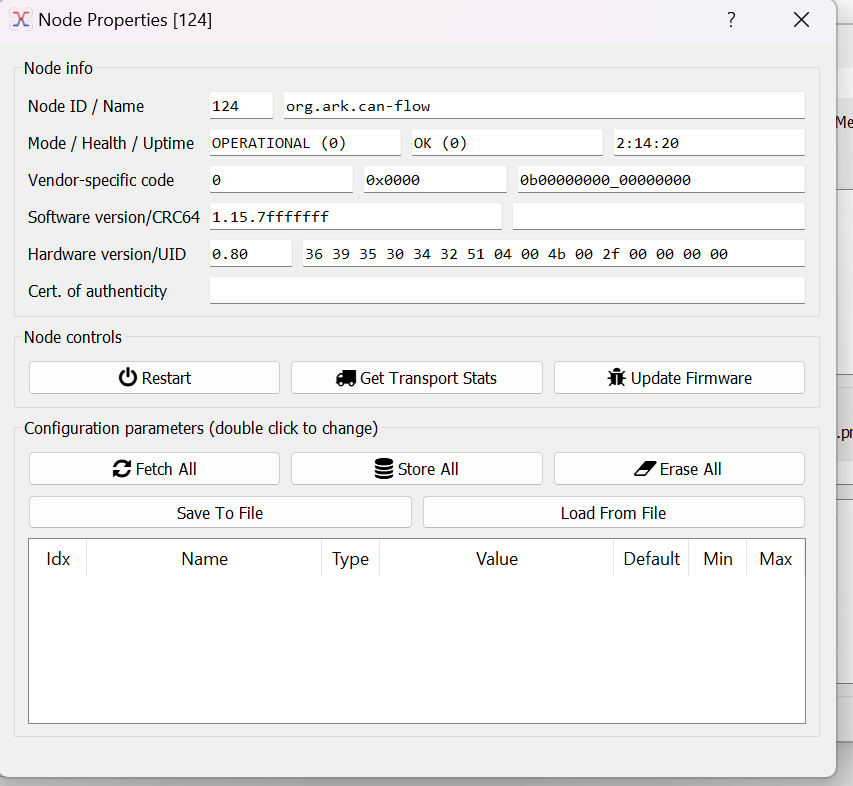
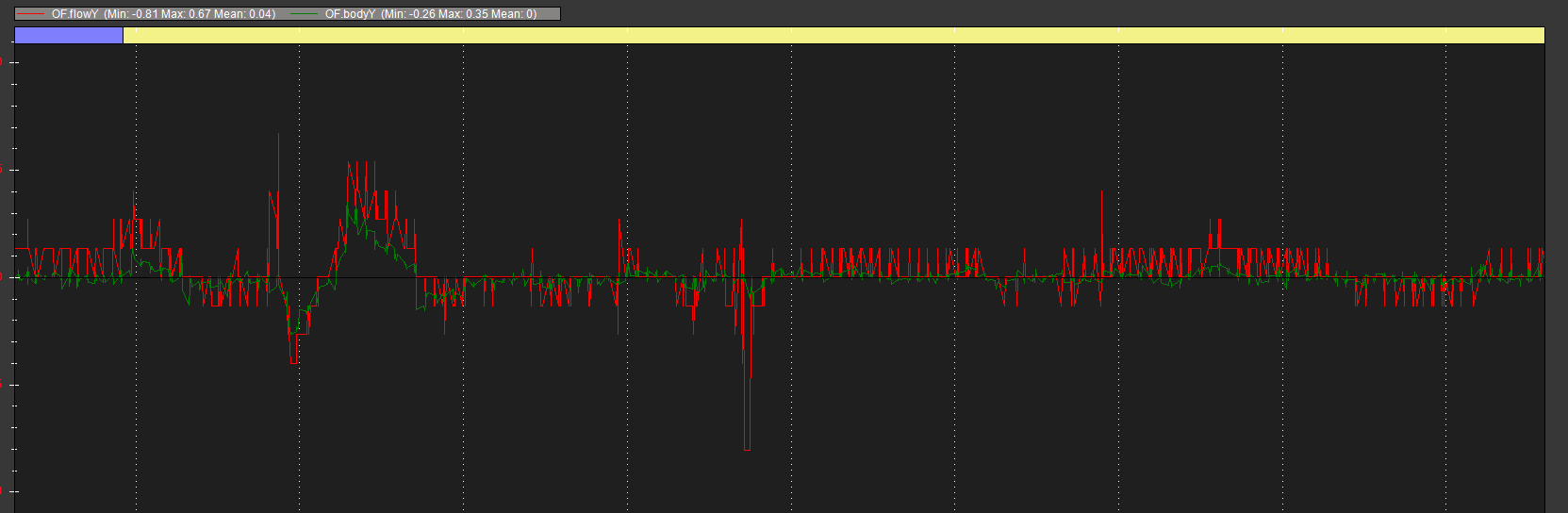
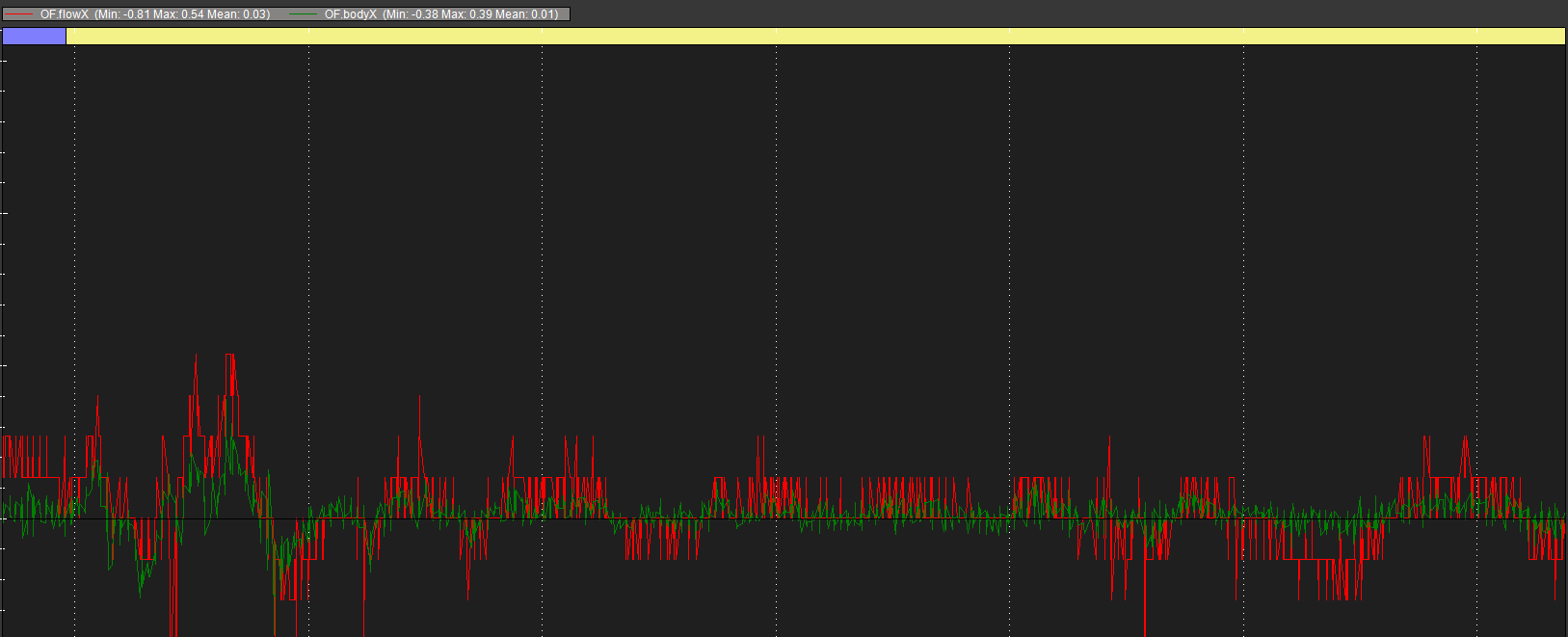
I’m using pixhawk6C and i change the port from CAN1 to CAN2, others parameter remains the same. The flight surprises working well. Checked the log and the OF.flowX and OF.flowY looks sane and good to me.
However, I refly again but this time the issue appears again. I guess something bad on initialize or something. When the sensor is first used in flight controller, the flight is running smooth and well but when times go something weird happen and the issue appears.