I haven’t tried that on herelink (yet), only with the other GCS. Oddly enough, during calibration in QGC and joystick view, I see 1500 as center stick on C3/Z/Throttle.
So somewhere between calibration and actually flying, the GCS is sending out a signal less than 1500 at center stick. However, I expanded the dead zone on throttle as high as Mission Planner will allow and I’m still seeing the same descent.
And yet, the logs do show a throttle output of less than 1500 at center stick–despite 1500 being shown as center stick in both QGC and Mission planner.
Perhaps looking at the raw pwm signal on some PWM analyzer would be a good 3rd perspective?
Do you think you have a cross-channel setup accidentally? meaning two hardware buttons or stick set to channel 3? Have you done a hardware RC calibration on the Herelink side? I do not experience that in my Herelink. My Herelink firmware build is BRU01211104. In the past, we have had trouble upgrading it to a newer version and we have given up upgrading.
In this case increasing the deadzone won’t help I think so I’d return RC3_DZ back to 30 or 50.
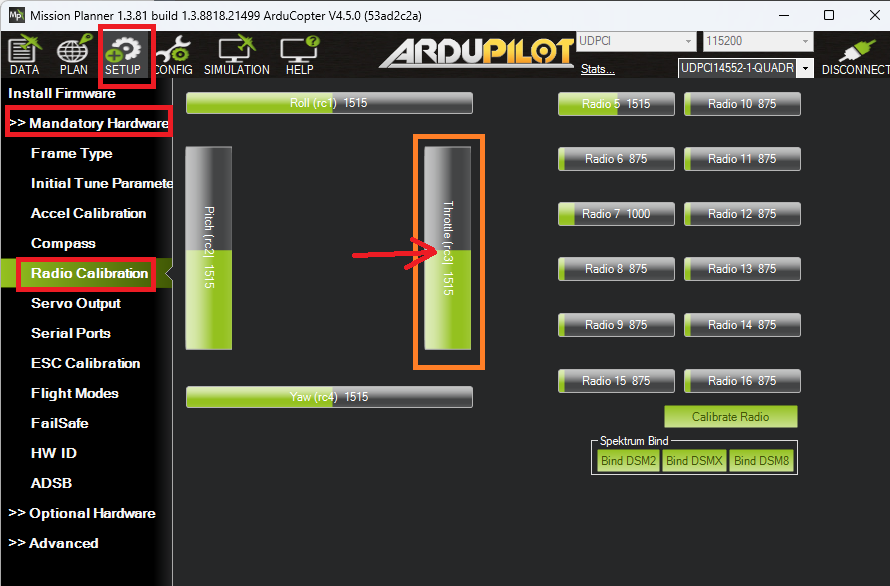
This is all outside of AP now so I’m just guessing but I think it would be good to look at MP’s RC Calibration page and make sure that around 1500 is output when the throttle stick is in the middle position. This appears to be the issue. From AP’s point of view, the pilot is pulling the throttle down.
While I wish it was a simple parameter to adjust, this is a solid start point. I have multiple GCS’s so I’ll change those out tomorrow and see if that changes anything.
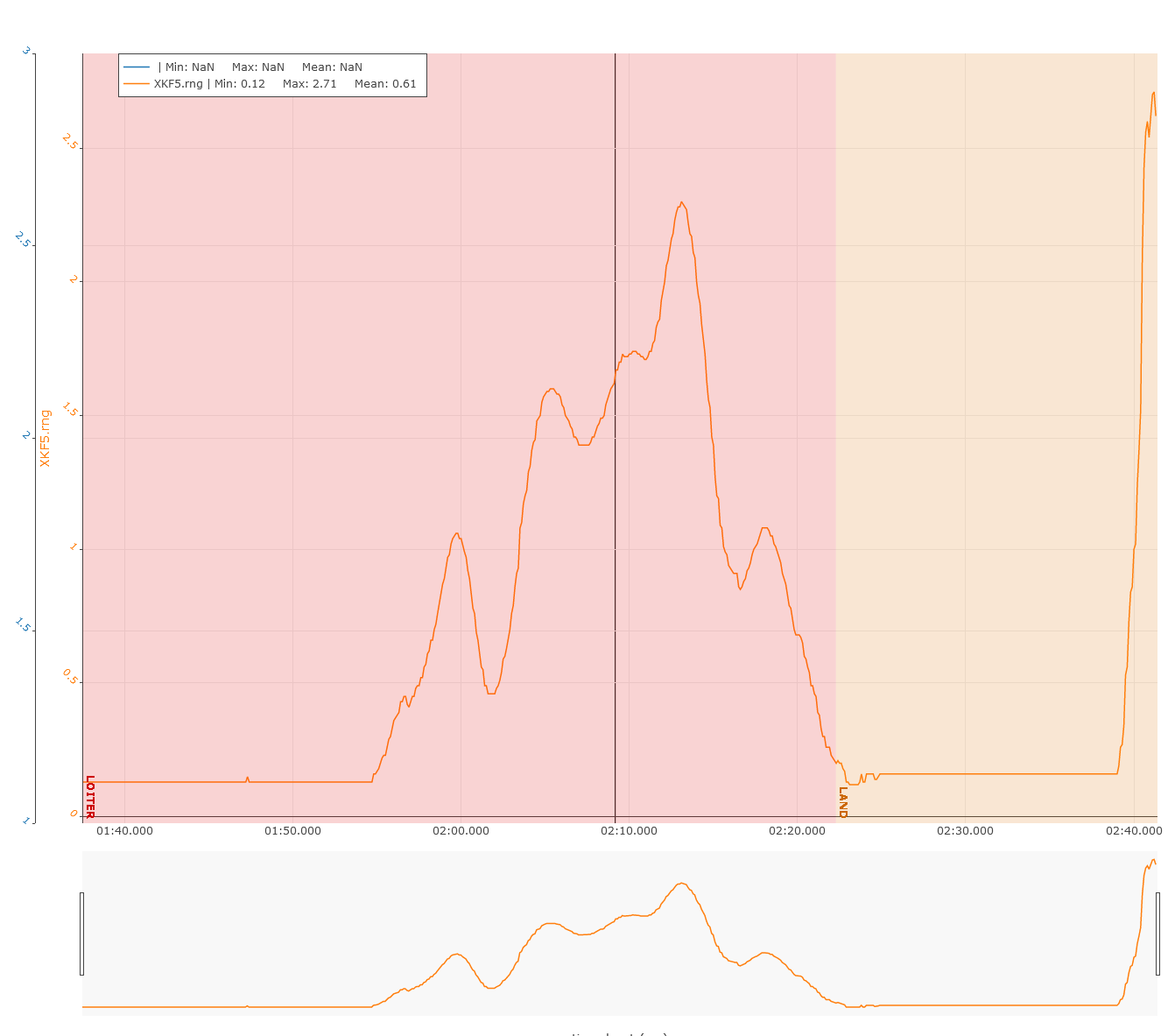
Data from the ARK Flow rangefinder in the logs looks good. It is a 30m sensor, so the only reason to use a separate rangefinder would be if you wanted more range.
Check with Ark Flow to see if the sensor can configure to support higher transfer rate or higher sampling time. In my additional height sensor case, I use 921600 bps serial speed.
Feel free to send on a new log but I just want to reiterate that from the previous log that was posted above the issue was very clearly that the pilot throttle stick was pulled low.
The issue was not the rangefinder, not vibration, not tuning.
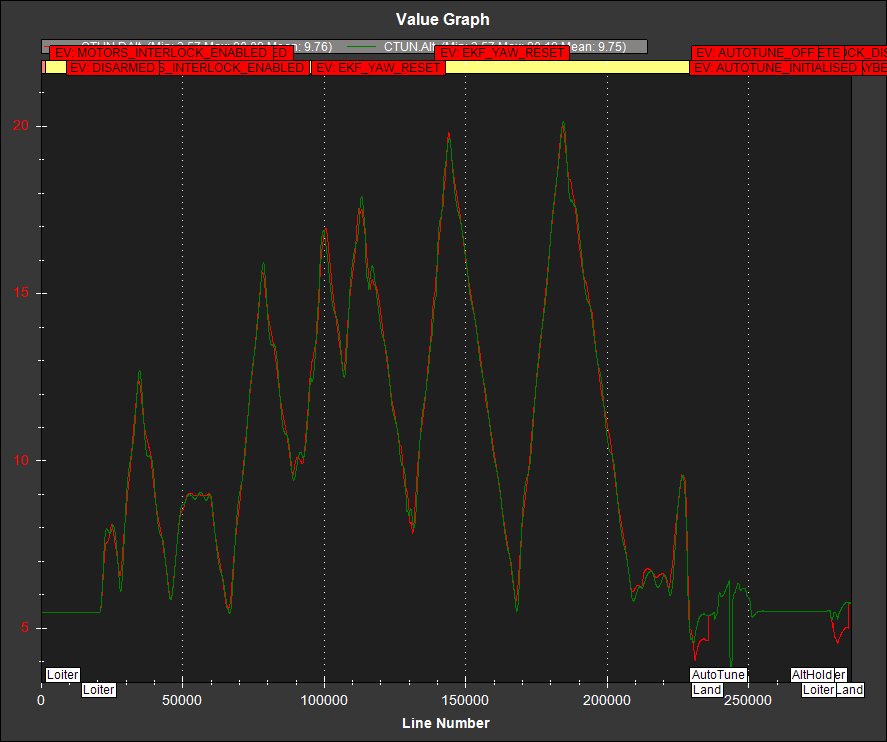
What catches my eye the most is the delta between CTUN Alt vs Salt (achieved altitude vs achieved rangefinder altitude or DAlt vs DSalt.
This is with a new ground control station (Herelink). Terrain is my back yard with minor obstacles (picnic table etc). Bright, sunny day. I also did a few attempts over a concrete slab and had the same experience.
Re the Alt vs SAlt different. The “Alt” field is not actually the altitude above home but instead the altitude above EKF origin. We could change this to be altitude above home but internally the controllers are all based on offsets from the EKF origin.
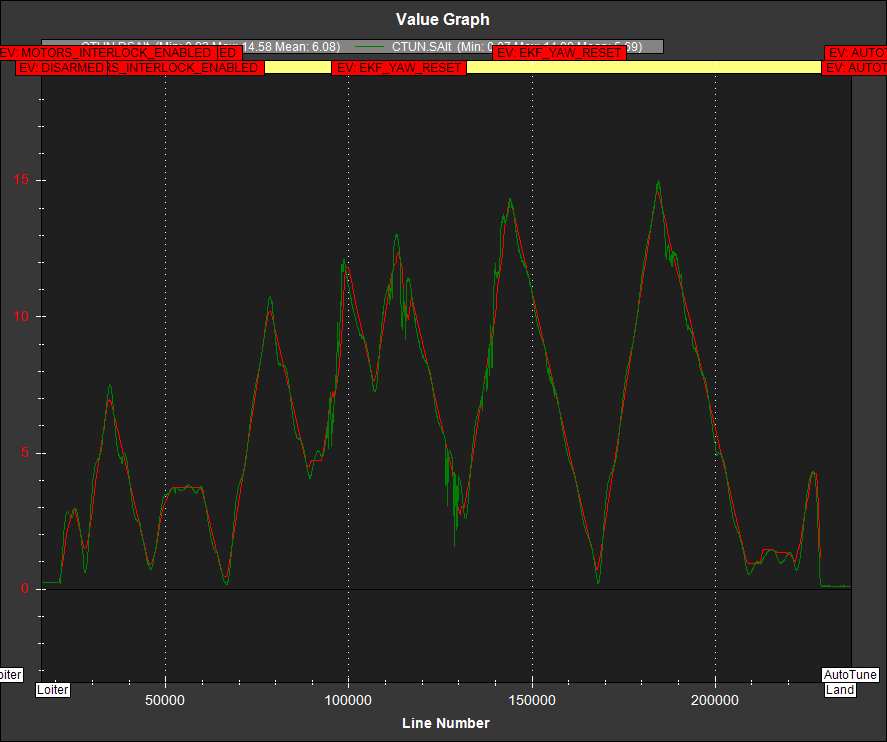
In general one wouldn’t compare DAlt and DSalt because one of the altitudes is an altitude above home while the other is desired altitude above terrain (aka desired sonar alt). Instead, if we want to judge whether the altitude controllers are performing correctly or not we compare DAlt vs Alt (desired vs actual altitude above home) or DSalt vs SAlt (desired vs actual altitude above terrain).
So here is the DAlt vs Alt and the two match quite well.
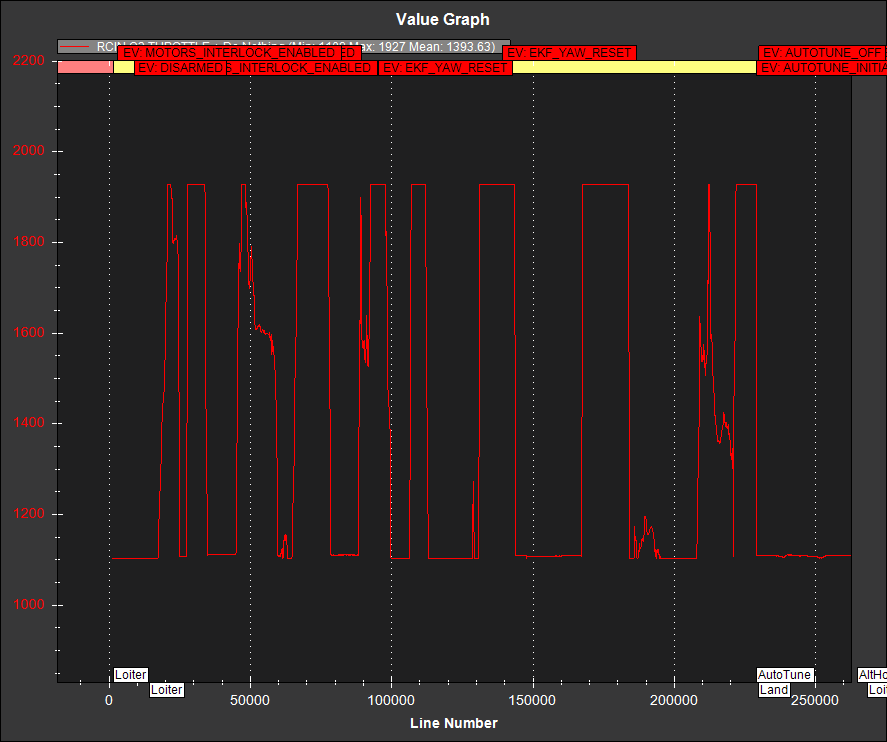
Again in this log when we look at the RC input for channel 3 (throttle) we see that the pilot is just jamming the throttle completely up and then completely down. I’m pretty sure that if you try other modes like Brake and Guided you’ll find the vehicle holds altitude. So the issue is with the RC.
Have you checked MP’s RC calibration screen to ensure that when you release the throttle stick the throttle goes to the middle position?
When I connect with my herelink and then open MP (which automatically connects to the vehicle through the herelink because I’ve enabled my Herelink to connect to my local Wifi) then I see this.
I’ll look at RC calibration again but I’ve changed 3 different ground control stations and I’ve had the same consistent issue. 2 Herelink and 1 joystick.
Strangely enough, the drone begins to descend as soon as I reduce throttle input from from 100% to, say, 80%. It’s falling when I do anything less than full throttle. One might suspect the thrust/weight ratio is off but that’s definitely not the case since the actual thrust/weight ratio is about 3:1 without payload.
To give a clear signal in the logs, I release to center stick so we at least have a nice contrast in input. However, anything less than 90% and we’re falling.
I’ll recalibrate the GCS’s again though and update new logs.
No, this is just changing out one radio system at a time. Each GCS was initially calibrated separately, at different times, different computers, using different radios (herelink, fpv, microhard, etc). I’ll recalibrate the herelink GCS with the air unit as rmackay9 suggested. This is probably the best place to start since we’re all familiar with the system / less variables.
A photo would just be a picture of the Herelink controller and the air module. haha
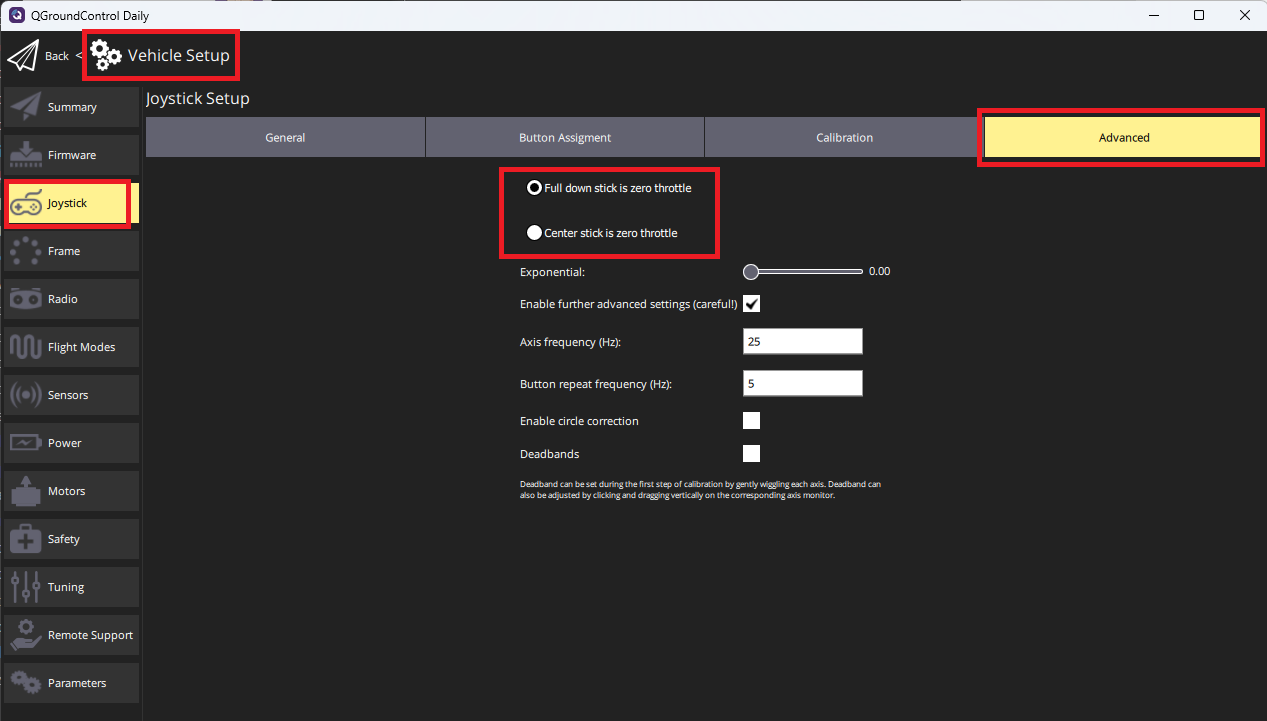
I redid calibration on the herelink controller. Starting from pairing with the air unit and all the way through the calibration.
Center stick is zero throttle. No exponential thrust.
I do however have a dead zone on channel 3 (throttle) with a value of 50. If you don’t recommend this, I’ll remove the dead zone but for anyone reading this in the future, here’s my logic in adding the dead zone:
The problem, as rmackay9 noted, appears to be that the throttle is sending a descend value despite being at center stick so to eliminate this (aside from recalibrating), I’m trying to filter out minor movements–much like how a steering wheel works on a heavy machinery; you have a lot of play in the wheel before the vehicle starts turning (heavy things shouldn’t be allowed to quickly change direction). That’s my logic here at least, as I understand the software to function. Anyone feel free to correct me on that though.
If full down stick is zero throttle and the stick naturally returns to center rather than down (spring loaded), we’ll naturally come back to 50% throttle when the pilot releases the sticks.
The problem with that, given the 3:1 or 2:1 thrust ratio depending on payload, is that the drone will require constant throttle input to maintain altitude which defeats the purpose of loiter mode—and also relearning the controller.
It’s a bit of an issue because a couple years ago I had an x class (4:1 ratio) with bottom stick as zero. Since the GCS is spring loaded, we went from 0-90 mph in just a couple seconds on arming, went up to 200 feet and I had to force land it which ended up just crashing.
All that is to say, the requirement is to let go of the sticks and the drone should hover in place without gps.
Oh dear, sound like you are first time flying a drone. Hmmm, and you immediately jump into 18" propeller drone. You are lucky if you are not injured. I think you have more things to read up first. please familiarize yourself what are the differences between Alt Hold, Loiter and Stabilize modes.