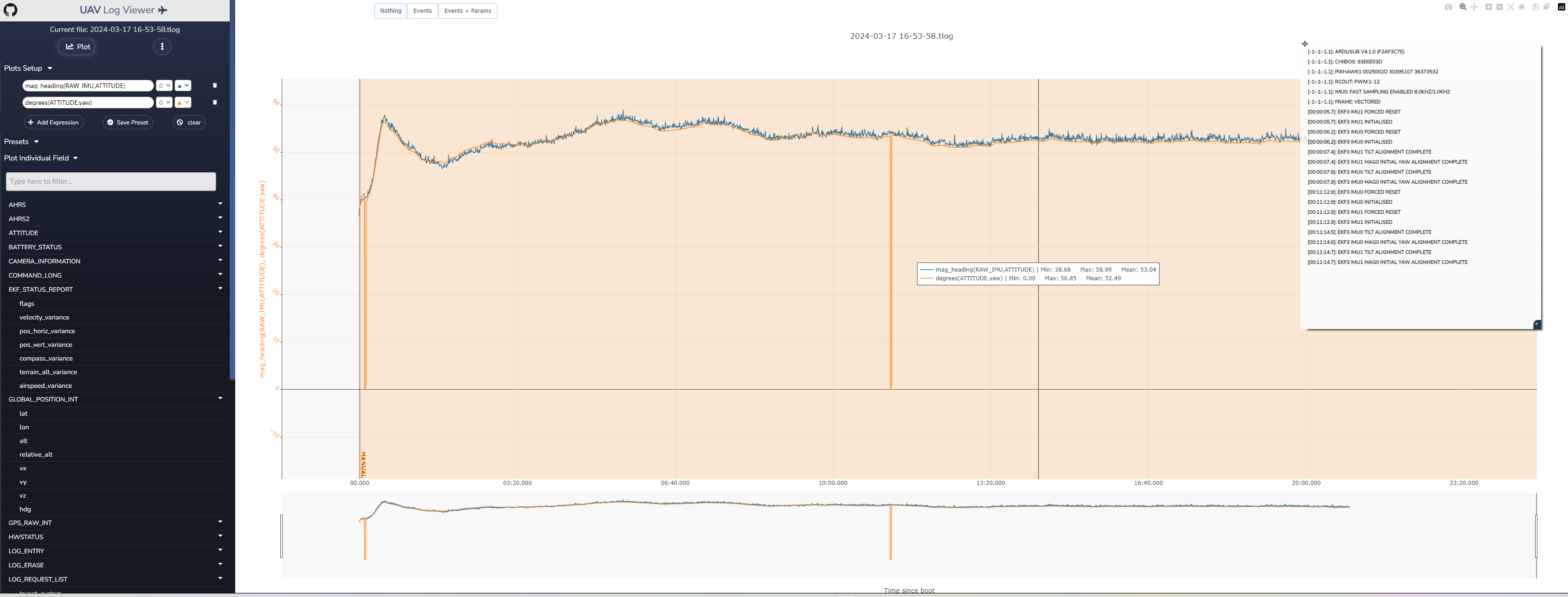

The heading angle output from my EKF3 always gets reset and cleared to zero. I’ve checked the logs and still can’t see the problem. Can anyone please help me?
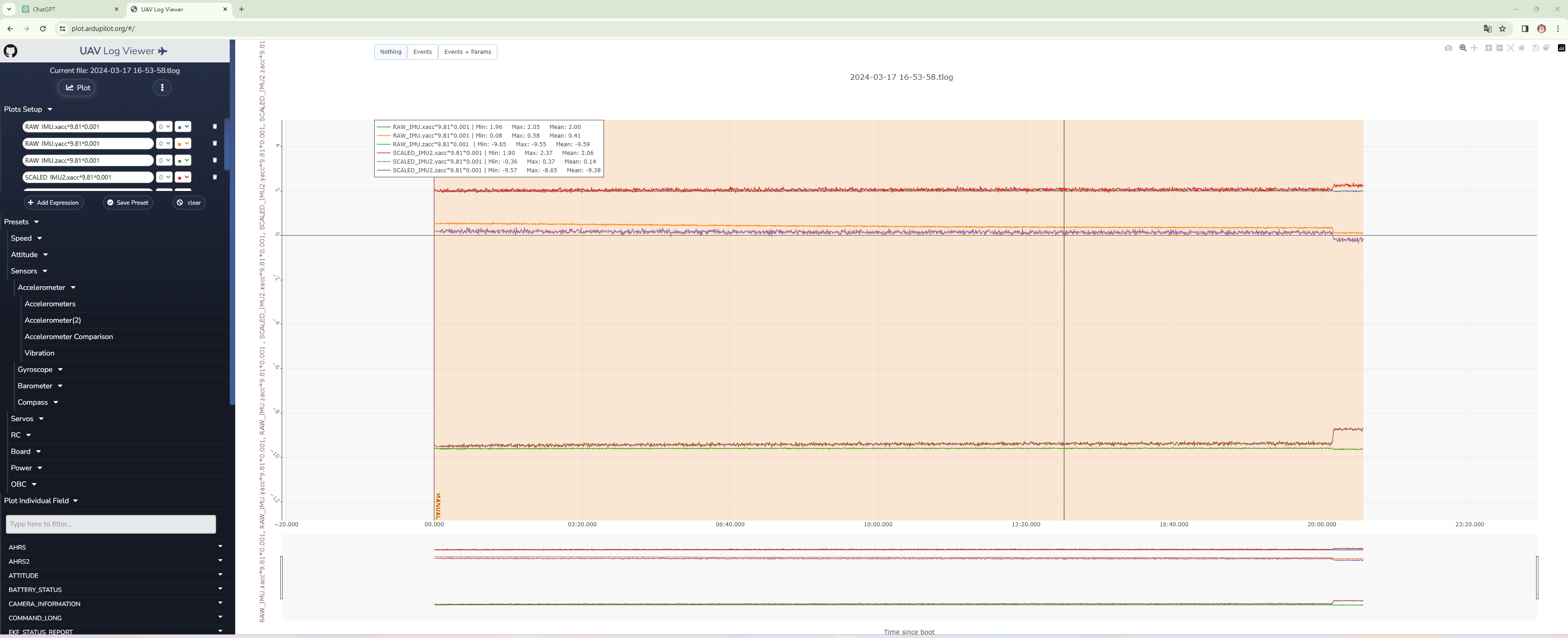
Some people have analyzed that it may be a problem with the accelerometer and needs to be recalibrated, but I feel that my accelerometer data is correct.
I can provide you with the logs as I am unable to upload them to this site.
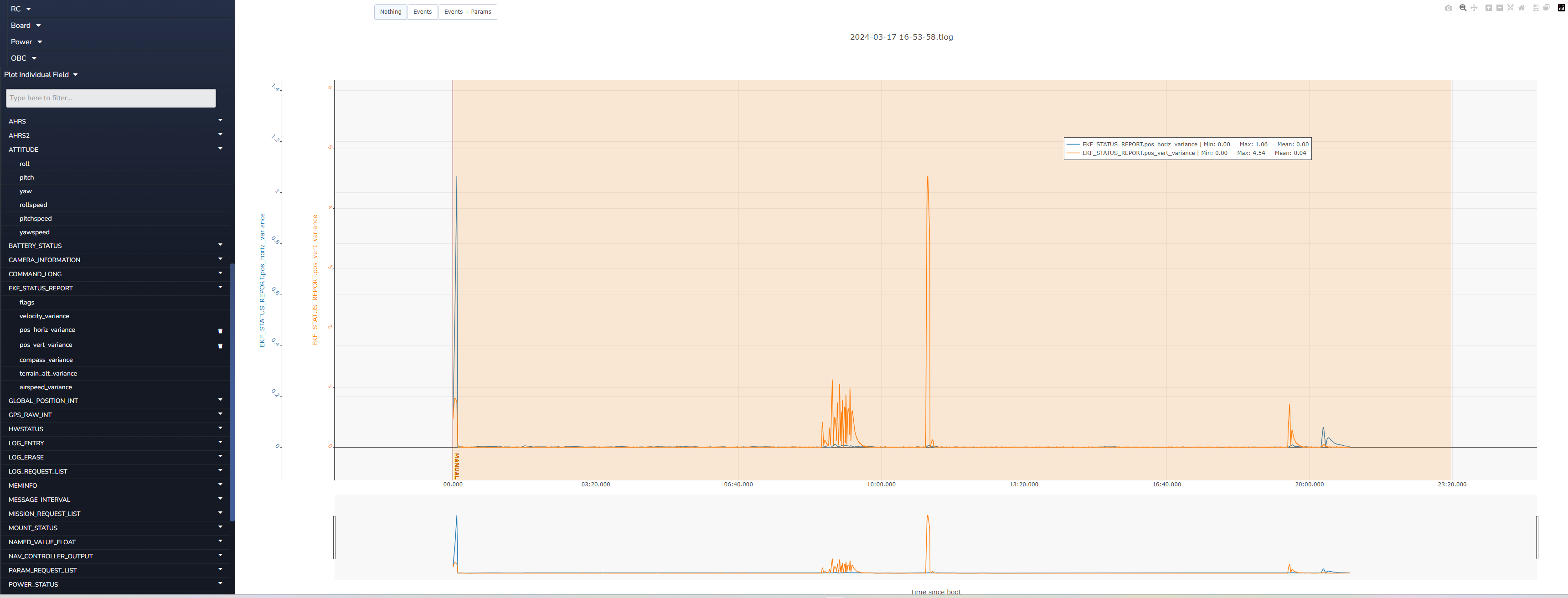
Someone has analyzed that excessive z-axis acceleration bias will lead to such a result, but my log does not provide acceleration bias data. Do I need to look at the derivative of the velocity curve?
At that time bluerov2 was soaked in water and almost motionless.