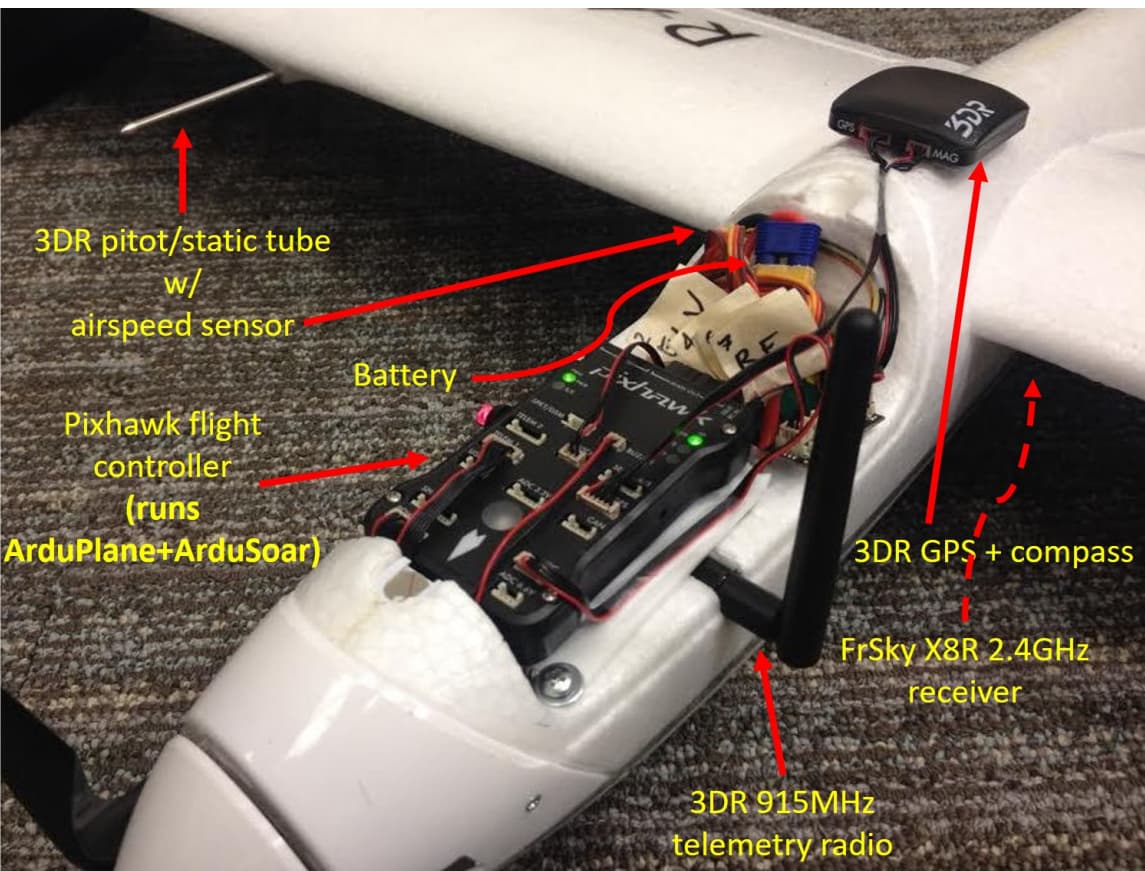
Configuration in mission planner
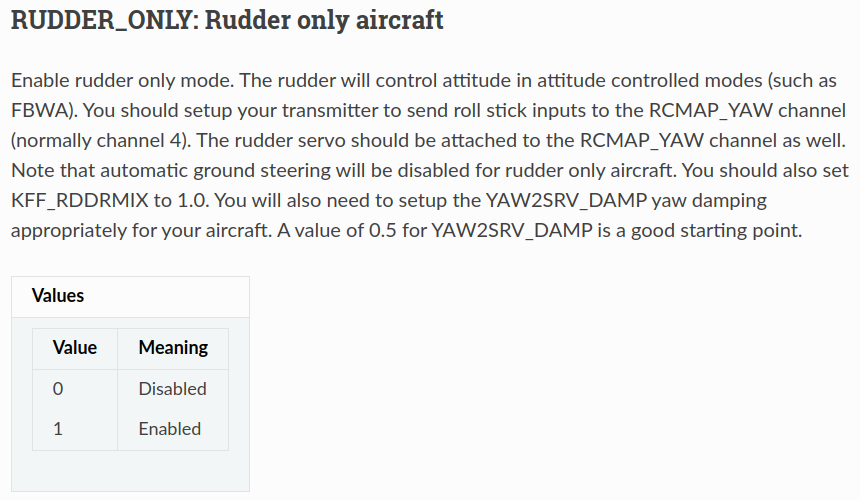
The radian does not have ailerons. Hmm, luckily I found RUDDER_ONLY.
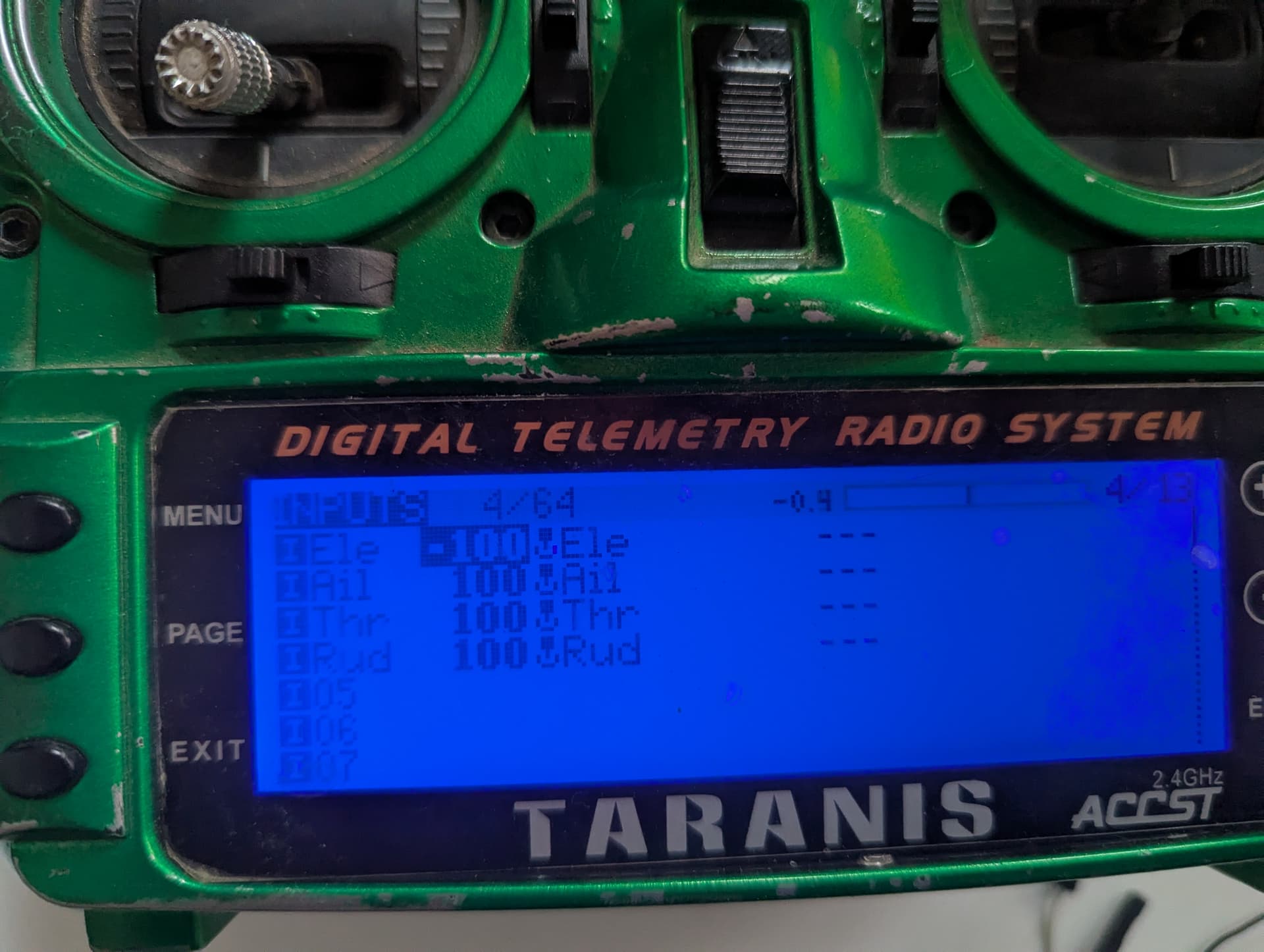
I followed those instructions. Here’s the mixes on my transmitter running OpenTX
Elevator INPUT is reversed per usual, but on the MIXER tab, I have moved the rudder input to be combined on channel 4. THis means that my roll and yaw sticks do the same thing. I can arm with either, and I can control the roll/yaw with either.
Because I don’t have a GPS or airspeed sensor, EKF3 is unhappy (pre-arm failures).
I disabled GPS arming check. I set AIRSPEED_USE to 0.
In hindsight, I should change GPS_TYPE from 1 to 0.
Next, because EKF3 wasn’t going to work, I forced the plane in DCM.
AHRS_EKF_TYPE is now 0.
And, the final param file:
mav.parm (21.7 KB)
At the field, I turned on SERVO_AUTO_TRIM at the recommendation of Henry.
2025-01-03 - Flights 1, 2, 3
All prepped and charged up!
I’m planning to use stick arming, but have concerns that it might disarm in flight. The plane has no idea it’s flying because it has no ability to measure speed.
I took off in MANUAL mode without a hitch - very out of trim, but typical for this cheap foamie.
Here’s the logs and flight report. I’ll be uploading them all here as I go. Here’s a picture of a flyby (I flew one-handed for this, hope you like it).
Key notes from the first flight:
- I can’t turn sharp in FBWA at all, I thought the default was 45 degrees roll?
- The plane is stable in FBWA, but has heavy oscillations in roll/yaw. The yaw servo wags full deflection if I do anything but glide at low speed resulting in instability. Overall, I’m quite bummed the default parameters for ArduPilot fly this poorly and need to work with the dev team. I would expect a reasonably stable tune, especially given the massive dihedral on the radian.
- The minimum pitch angle (descent) seems good, the max pitch angle (ascent) is much too shallow - this can climb almost vertical.
- Full throttle is totally overkill for autonomous flight, I should find a way to limit this during navigation to something like 50-75%
- Auto trim didn’t seem to work well, it still was pitching up to near stall in MANUAL mode.
- I couldn’t disarm until I connected USB and clicked the ARM/DISARM buttun in mission planner. What a safety hazard. I’m going to switch to switch arming.
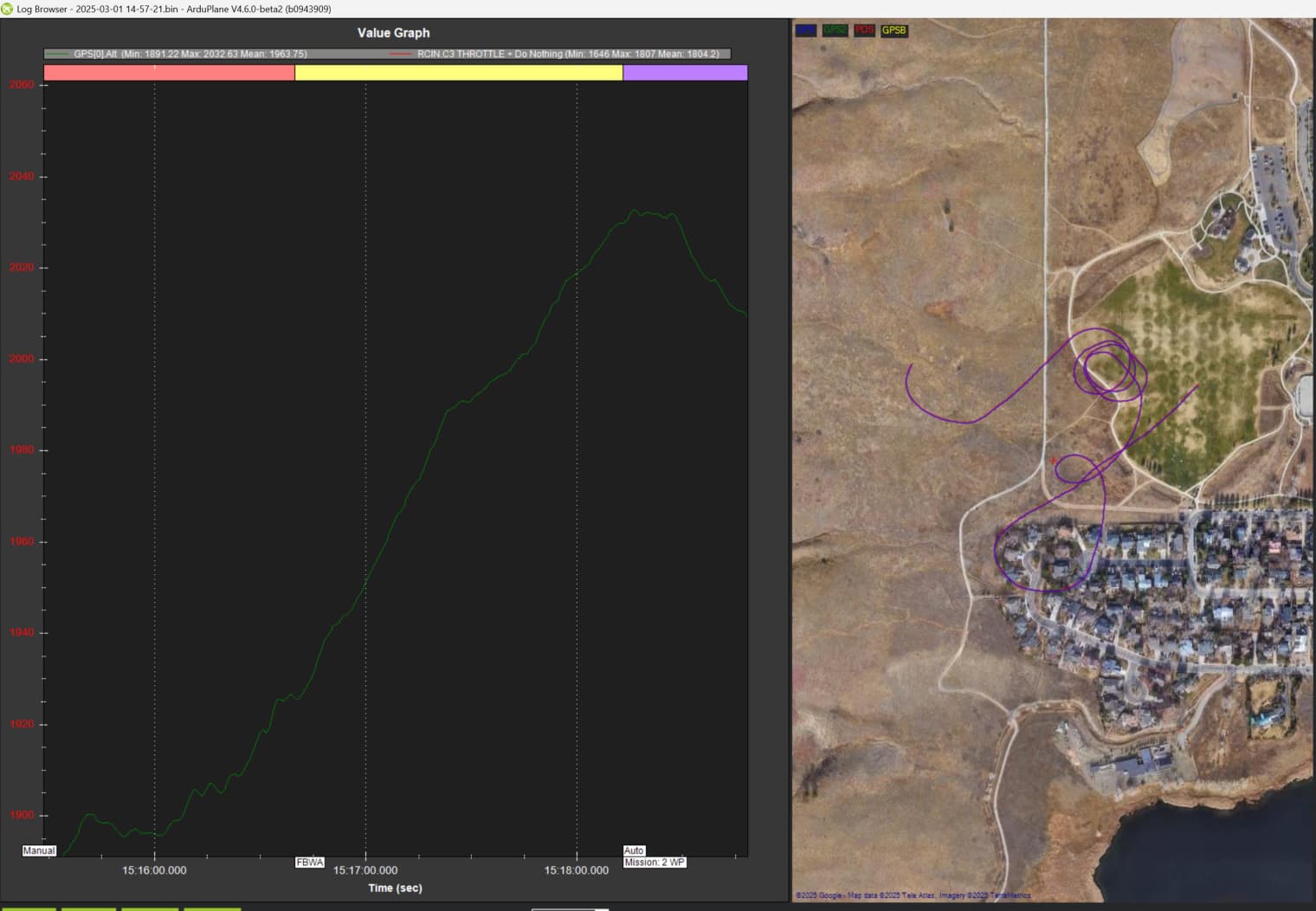
When I landed, I went back home and checked the logs. Here’s what I was seeing.
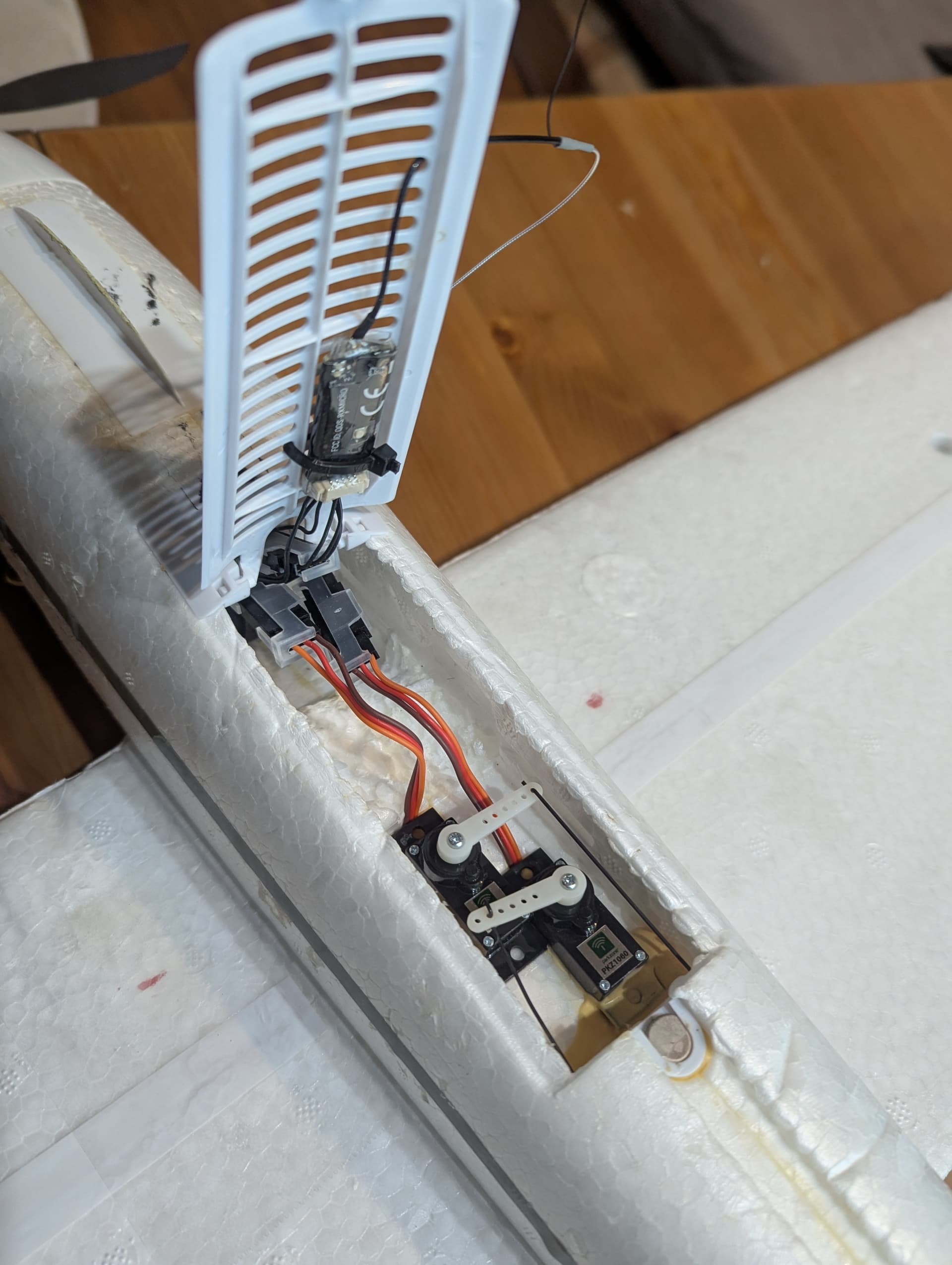
In FBWA, you can see the rudder (servo 4) outputs oscillating terribly. That was log 1 12-31-1979 5-00-00 PM.bin.
Upon inspection of the code, I realize that:
- SERVO_AUTO_TRIM likely won’t work because the AHRS has no idea how fast the vehicle is moving, and requires 8m/s groundspeed and estimated airspeed, so I manually add some pitch down and roll right trim in the trim tab
- I can’t tell why my roll angle seemed shallow in FBWA, but don’t bother checking further.
For the roll/yaw oscillations, my first guess was that the value of YAW2SRV_DAMP was too high, so I cut it in half per the recommendation on RUDDER_ONLY.
Second flight has the same exact behavior of rudder servo oscillations. I quickly land, and cut YAW2SRV_DAMP all the way to zero. No effect. Sigh… At least the trim is decent now through a manual trim in mission planner.
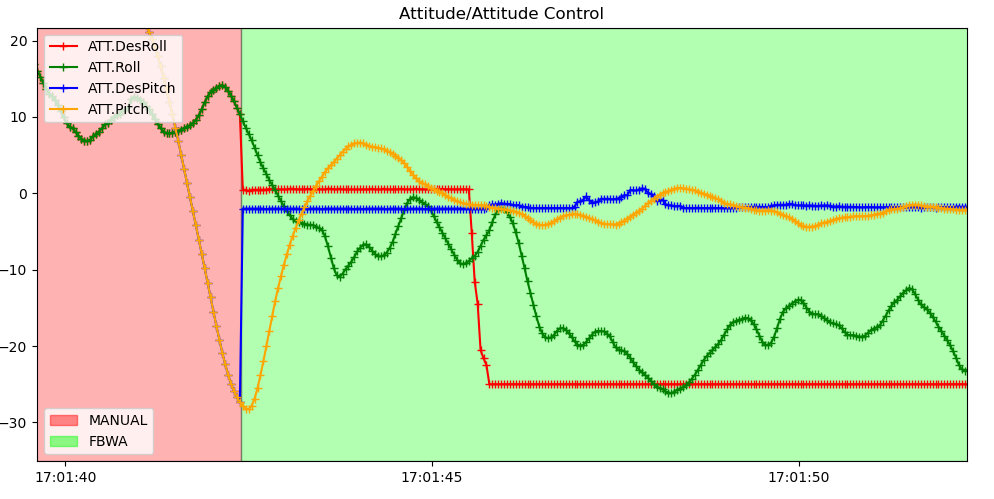
Third flight, I fly circles in FBWA, trying to see why it doesn’t seem to roll at 45 degrees. Here’s the plots for that circle that I thought were useful- I knew I commanded max roll input in FBWA, and here’s the target and achieved roll angle.
25 degrees. Huh… I know there’s some stall prevention code in ArduPilot. A quick search on the wiki - ah yea, 25 degrees is the limit. This must be it! Reading further down, I see stall prevention is active at low speeds. Again, the AHRS doesn’t know the speed of the vehicle without GPS or airspeed, so that’s another thing. So, now, I have disabled STALL_PREVENTION.
So, the obvious problems are fixed, but I still have this terrible oscillation. I did try adjusting the roll P gain after the 3rd flight in Mission Planner, but regardless of what I typed or clicked in the tuning page, the value did not change, even after a reboot of the vehicle and mission planner.
Best to look at the logs and find root cause or run auto tune rather than fight this.
Overall, it’s great to get this bird in the air, despite all the workarounds. We have nasty weather coming soon, and I wanted to some log data to review for the poor weather. The vehicle flies great with the current CG, battery, and wing loading in MANUAL. Much easier to launch than my fully loaded Cularis, so I have a feeling I’ll be doing a lot of the development on the radian.