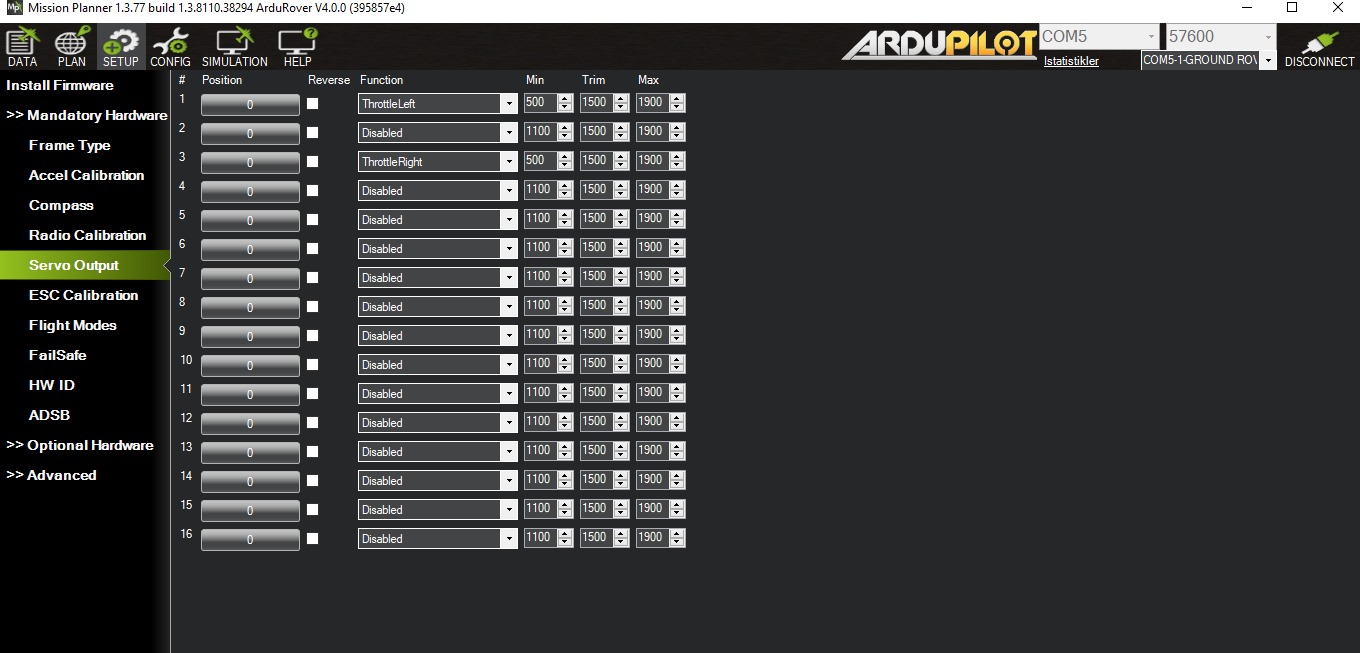
Hello everyone ,ı am building a rover for my school project. ı am using a Navio2 brushed motor with h bridge driver. so ı am using skeeting motor here is my problem; While making the necessary installation and software settings, I can control the motors and the commands from the rc control work, but when everything is ok and turn it off and on, the servo output does not react as you can see in the picture. When I reinstall from scratch, I can get the necessary output values. Does anyone know what the problem would be? you can see the picture.