The Aion Robotics ArduRover R1 is now available. Skid steer 4 motors RoboClaw motor controller. Encoders. Different towers available for various sensors. Run time of several hours. Plenty of room for a companion computer up to Jetson dev board size. Get yours now at www.aionrobotics.com.


4 Likes
Love this. Great work from Nick!
1 Like
really nice piece of kit! well done
1 Like
Yea Nick is a wizard this bot is really nice in every detail. Its alive as of tonight. TX2 M.2 drive for video. ZR300 Realsense while the ZED is being repaired. Sweep lidar SF11C fall back lidar. And in a few days a radar unit. Its late thought I’d have it by the weekend.
So we’ll see I have tons of packages built to put on the rover. If it had only been in existence 2 years ago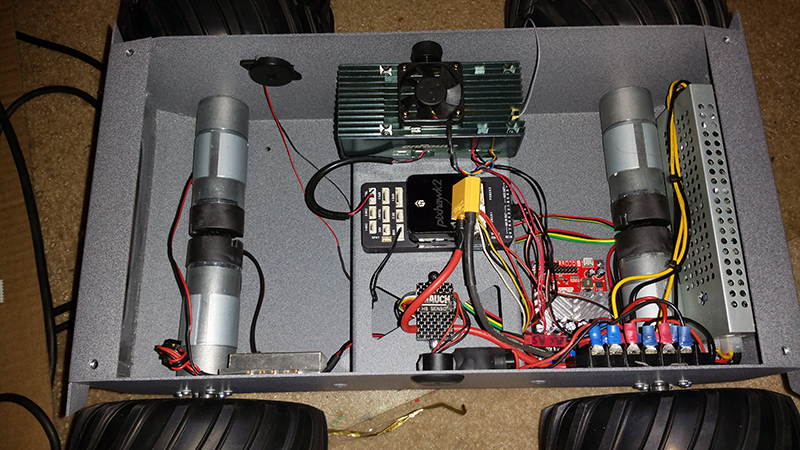
 The 3 camera rig for making redtail models is ready to go. Alexey put up the experimental rover implementation so that is what I’m going to try and bring up. There are a pair of small clamps on top the 3 cam rig fits into. Easily removed for other tasks. Using Kalibr to calibrate the cameras and make the targets. Turns out checkerboards aren’t the way to go. The dnn model can’t tell which is the top in a lot of cases.
The 3 camera rig for making redtail models is ready to go. Alexey put up the experimental rover implementation so that is what I’m going to try and bring up. There are a pair of small clamps on top the 3 cam rig fits into. Easily removed for other tasks. Using Kalibr to calibrate the cameras and make the targets. Turns out checkerboards aren’t the way to go. The dnn model can’t tell which is the top in a lot of cases.
1 Like
First drive video. https://youtu.be/Jado7z2cwhc
1 Like
This looks great. I really liked the original version as well.
Pricing also seems reasonable.
Are there any plans for brushless motors in the future?
Also roughly what is the current draw whilst driving in a straight line on grass (just to get an idea of battery range)
Thx
Nick has several other bots in process. The M uses hybrid brushless motors that you can control with a brushed controller. 4 of those is more than the R1 costs total. Without a computer it gets several hours of runtime on a 4S. With TX2 and Lidar running about 2 hours is what I’m getting so far. Once I’m running the DNN stuff and the X2 is WOT I am sure that will go down some. I was leary that a 4s would do it frankly. My other rover with 6S 10K batt didn’t get anywhere near the runtime the ArduRover does. Nothing has fell off, gotten loose and I haven’t had to adjust anything. Which was a every run thing with the other bot. Including breaking it in half one time  Best of all I have the first production rover sitting right here besides me. All I gotta do now is live another 40 50 years and it will be worth a fortune Next time have it out I’ll see if I can get some amp readings for you.
Best of all I have the first production rover sitting right here besides me. All I gotta do now is live another 40 50 years and it will be worth a fortune Next time have it out I’ll see if I can get some amp readings for you.
Thx Dan. No rush.
I am interested because I have a few ideas for using one, but would like to run it more like a guard bot with IR IP camera during the night, without it needing to recharge until morning.
Hi @griz11
how did you connect the motors to the motor controller and how did you connect the motor controller to the pixhawk. is the pixhawk param file and schematic available?